GPS卫星导航基础.pdf
http://www.100md.com
2020年2月26日
 |
| 第1页 |
 |
| 第9页 |
 |
| 第11页 |
 |
| 第23页 |
 |
| 第43页 |
参见附件(11865KB,285页)。
GPS卫星导航基础,这本书为读者探讨了关于全球卫星定位的技术,佳宁淑了其中的工作原理以及技术结构组成,为开发者们更加理解到定位的原理。

GPS卫星导航基础介绍
本书旨在详细描述全球定位系统及相关的技术,讲述GPS如何工作以及如何应用,包括基本原理、系统结构、信号特点、坐标系转换、位置计算、差分技术、辅助GPS、GLONASS、GALILEO与北斗等其他GNSS介绍、数据格式与硬件结构,并包含了GNSS领域的新技术,以及GNSS应用等内容。本书条理清楚、内容丰富,易于理解和掌握,为GPS开发和GPS应用人员提供所需的参考内容,帮助读者快速和全面地理解GPS相关技术。
GPS卫星导航基础主目录
第1章 卫星导航快速入门
第2章 坐标系
第3章 卫星技术基础
第4章 GNSS技术:GPS示例
第5章 GLONASS、GALILEO和北斗系统
第6章 计算位置
第7章 改进的GPS:DGPS、SBAS、A-GPS和HSGPS
第8章 数据格式与硬件接口
第9章 GNSS接收机
第10章 GNSS应用
阅读这本书能够得到什么
要想了解卫星导航的许多新兴和迷人的潜在应用的发展,需要先了解这些系统工作的方式。如果你熟悉该系统的技术背景,就能够开发和使用新的定位和导航设备。本书既探讨了可行性,也探讨了该系统的一些限制,以便你抛开不切实际的期望。
这本书是怎样诞生的
2000年,我决定减少花在我所在大学授课上的时间,以便去了解商业卫星导航产业的全貌。我希望能为直接从事卫星导航的公司工作,而正好有一家名为u-blox AG的公司热情地接纳了我。u-blox AG要求我编写一本送给客户的介绍材料,于是就有了这个由以往文章和新编章节组成的概述。
GPS卫星导航基础截图
GPS卫星导航基础
(瑞士)让-马利・佐格(Jean-Marie Zogg)著 ?中文在线数字出版集团股份有限公司,2015-2016
数字版图书
GPS卫星导航基础(瑞士)让-马利・佐格(Jean-Marie Zogg)著.北
京:中文在线数字出版集团股份有限公司,2016.3.
CAEBN:7-001-000-60593368-1
分类号:全球定位系统 P228.4
互联网出版许可证:新出网证(京)字045号
GPS卫星导航基础
(瑞士)让-马利・佐格(Jean-Marie Zogg) 著
出 品 人:童之磊
责任编辑:朱厚权
出版发行:中文在线数字出版集团股份有限公司
地 址:北京市东城区安定门东大街28号E座9层
邮政编码:100007
网 址:www.chineseall.com
首次发布:2016.3.21
更新时间:2016.10.11
上架建议:天文学、地球科学
本书由中航出版传媒有限责任公司授权中文在线数字出版集团股份有
限公司互联网出版与发行,未经书面授权,不得在任何地区以任何方式
反编译、仿制或节录本书文字或图表。本书电子版如有错讹,敬请读者
指正,我们会及时更新版本。
电子邮箱:copyright@chineseall.com
中文在线数字出版集团股份有限公司为作者和相关机构提供数字出版
服务。
纸质版图书在版编目数据
出版社:航空工业出版社
ISBN:978-7-80243-789-0
出版时间:2011.8.1目 录
电子,编程,计算机技术,编程教程,编程资料,python教程,Java教
程,android教程,github,ai,爬虫
内容提要
前言
自序
导论
第1章 卫星导航快速入门
1.1 测量信号传输时间的原理
1.1.1 卫星导航的基本原理
1.1.2 信号行程时间
1.1.3 测定位置
1.1.4 时间误差的影响和修正
第2章 坐标系
2.1 引言
2.2 地球体
2.3 椭球与基准面
2.3.1 椭球
2.3.2 制定本地参考椭球与基准面
2.3.2.1 本地参考椭球
2.3.2.2 基准面、地图参考系
2.3.3 国家参考系
2.3.4 国际参考椭球WGS-84
2.3.5 从本地参考系变换至世界参考椭球
2.3.5.1 大地基准面
2.3.5.2 基准面转换
2.3.6 转换坐标系2.3.6.1 将笛卡儿坐标转换为椭球坐标
2.3.6.2 将椭球坐标转换为笛卡儿坐标
2.4 平面地区坐标、投影
2.4.1 高斯-克吕格投影(横切墨卡托投影)
2.4.2 UTM投影
2.4.3 瑞士投影系(正形双重投影)
2.4.4 全球范围的坐标转换
2.4.4.1 示例:将WGS-84坐标转换为CH-1903坐标
2.5 栅格地图地理对位
2.5.1 引言
2.5.2 变换基础
2.5.3 确定变换坐标
2.5.4 确定变换参数a,b,c,d,e,f
2.5.5 示例(将栅格地图变换为WGS-84)
第3章 卫星技术基础
3.1 开普勒定律
3.1.1 开普勒第一定律
3.1.2 开普勒第二定律
3.1.3 开普勒第三定律
3.2 卫星轨道
3.3 轨道高度
3.4 无线电频率
3.5 时间系统
3.5.1 国际原子时(TAI)
3.5.2 协调世界时(UTC)
3.5.3 GPS时
3.5.4 卫星时3.5.5 地方时
第4章 GNSS技术:GPS示例
4.1 引言
4.2 全系统描述
4.3 空间部分
4.3.1 卫星的分布和运动
4.3.2 GPS卫星
4.3.2.1 卫星结构
4.3.2.2 通信链路预算分析
4.3.2.3 卫星信号
4.3.3 生成卫星信号
4.3.3.1 简化框图
4.3.3.2 详细框图
4.4 控制部分
4.4.1 失效可能性与人为信号失真(SA)
4.5 用户部分
4.6 GPS导航电文
4.6.1 引言
4.6.2 导航电文的结构
4.6.3 子帧包含的信息
4.6.4 遥测字(TLM)与转换字(HOW)
4.6.5 25页的细分
4.6.6 星历与年历数据比较
4.7 GPS现代化
4.7.1 新调制方法,BOC和MBOC
4.7.1.1 BPSK(1)―调制
4.7.1.2 BOC―调制简介4.7.1.3 MBOC调制(多路BOC,MBOC(6,1,111))
4.7.2 GPS现代化
第5章 GLONASS、GALILEO和北斗系统
5.1 引言
5.2 GLONASS:俄罗斯系统
5.2.1 GLONASS的建成
5.3 GALILEO
5.3.1 概述
5.3.2 计划中的GALILEO服务
5.3.2.1 开放服务,OS
5.3.2.2 商业服务,CS
5.3.2.3 人身安全服务,SoL
5.3.2.4 公共管制服务,PRS
5.3.2.5 搜索和救援,SAR
5.3.3 精度
5.3.4 GALILEO技术
5.3.4.1 信号频率
5.3.4.2 时间计划
5.3.5 GNSS最重要的三个特性
5.4 中国的北斗1代和北斗2代系统
5.4.1 目前的系统:北斗1代
5.4.2 未来的系统:北斗2代
第6章 计算位置
6.1 引言
6.2 计算位置
6.2.1 测量信号行程时间的原理(伪距估算)
6.2.2 方程的线性化6.2.3 解方程
6.2.4 小结
6.3 确定行程时间的具体方法
6.3.1 时间系统
6.3.2 确定行程时间的具体方法
6.3.2.1 第1步:通过相关性确定信号到达时间
6.3.2.2 第2步:对数据和或导航电文进行重构
6.3.2.3 第3步:确定发送时间
6.3.3 确定行程时间误差
6.3.4 影响行程时间的其他因素
6.4 误差分析与精度因子
6.4.1 引言
6.4.2 卫星几何形态对精度的影响,DOP值
6.4.2.1 引言
6.4.2.2 图解DOP值成因
6.4.2.3 DOP值的实际含义
6.4.2.4 总误差
6.4.2.5 计算DOP值
第7章 改进的GPS:DGPS、SBAS、A-GPS和HSGPS
7.1 引言
7.2 GPS误差源
7.3 减小测量误差的可行性
7.3.1 基于信号行程时间延迟测量的DGPS
7.3.1.1 工作原理详细说明
7.3.1.2 确定修正系数
7.3.1.3 发送修正值
7.3.1.4 对测量伪距的修正7.3.2 基于载波相位测量的DGPS
7.3.3 DGPS后处理(信号行程时间和相位测量)
7.3.4 发送修正数据
7.3.5 根据播发范围对DGPS进行分类
7.3.6 修正信号发送标准
7.3.7 差分修正服务概览
7.4 DGPS实时修正服务
7.4.1 引言
7.4.2 基于RTCM SC-104的地面服务
7.4.3基于RTCMSC-104的卫星服务
7.5 广域DGPS(WADGPS)
7.5.1 星基增强系统,SBAS(WAAS,EGNOS)
7.5.1.1 引言
7.5.1.2 最重要的SBAS功能
7.5.2 现有系统和计划中的系统概览
7.5.3 计划中的RNSS概览
7.5.4 SBAS系统描述
7.5.5 使用RTCM SC-104的卫星DGPS服务
7.6 使用DGPS和SBAS可达到的精度
7.7 辅助GPS(A-GPS,AGPS)
7.7.1 引言
7.7.2 A-GPS原理
7.7.3 基准网络
7.7.4 A-GPS网络
7.7.5 采用在线辅助数据的A-GPS方式(实时A-GPS)
7.7.6 采用离线辅助数据的A-GPS方式(预测轨道)
7.7.7 架构7.7.8 控制平面架构
7.7.9 用户平面架构
7.7.10 架构优势
7.7.11 OMA安全用户平面定位架构(OMA-SUPL)
7.8 高灵敏度GPS(HSGPS)
7.8.1 提高振荡器稳定性
7.8.2 天线
7.8.3 噪声系数因素
7.8.4 相关器和相关时间
7.9 GNSS转发器或转发天线
7.10 室内用伪卫星
第8章 数据格式与硬件接口
8.1 引言
8.2 数据接口
8.2.1 NMEA-0183数据接口
8.2.1.1 NMEA协议结构
8.2.1.2 GGA数据集
8.2.1.3 GLL数据集
8.2.1.4 GSA数据集
8.2.1.5 GSV数据集
8.2.1.6 RMC数据集
8.2.1.7 VTG数据集
8.2.1.8 ZDA数据集
8.2.1.9 计算校验和
8.2.2 从NMEA转换为KML
8.2.2.1 Google Earth和KML简介
8.2.2.2 将NMEA转换为KML的方法8.2.3 DGPS修正数据(RTCM SC-104)
8.2.3.1 RTCM电文头(2.3版)
8.2.3.2 RTCM电文类型1(2.3版)
8.2.3.3 RTCM电文类型2~9(2.3版)
8.2.4 私有数据接口
8.2.4.1 示例:用于u-blox GNSS接收机的UBX协议
8.3 硬件接口
8.3.1 天线
8.3.2 供电
8.3.3 时间脉冲:1 PPS与时间系统
8.3.4 将TTL电平转换为RS-232
8.3.4.1 串行通信基础
8.3.4.2 确定电平及其逻辑分配
8.3.4.3 将TTL电平转换为RS-232
第9章 GNSS接收机
9.1 GNSS手持接收机基础
9.2 GNSS接收机模块
9.2.1 GNSS模块基本设计
第10章 GNSS应用
10.1 引言
10.2 各种应用介绍
10.2.1 基于位置的服务(LBS)
10.2.2 商业和工业应用
10.2.3 通信技术
10.2.4 农业和林业
10.2.5 科学与研究
10.2.6 旅游和运动10.2.7 军事
10.2.8 时间测定
附录
A 互联网上的资源
A.1 概要报告和链接
A.2 差分GPS
A.3 GPS机构
A.4 GNSS新闻组和GNSS技术刊物
B 资料来源
C 版本历史内容提要 本书旨在详细描述全球定位系统及相关的技术,讲述GPS如何工作
以及如何应用,包括基本原理、系统结构、信号特点、坐标系转换、位
置计算、差分技术、辅助GPS、GLONASS、GALILEO与北斗等其他GNSS介
绍、数据格式与硬件结构,并包含了GNSS领域的新技术,以及GNSS应用
等内容。本书条理清楚、内容丰富,易于理解和掌握,为GPS开发和GPS
应用人员提供所需的参考内容,帮助读者快速和全面地理解GPS相关技
术。
本书可以作为卫星导航定位技术开发者、导航技术应用者、软件工
程师、硬件工程师、高等院校师生的工具书和参考书。前言
我身在地球何处?
对这个看似简单的问题的回答有时会关乎生死。试想一下对于急于
找到一处安全着陆地点的飞行员,或者遇险船只上寻求救助的船员,或
者在群山中因恶劣天气迷失了方向的徒步旅行者,了解自己的位置是多
么重要,它蕴含了不可胜数的含义和用途。
尽管未必会遇到上述的戏剧性场面,但在我们的日常生活中,有时
位置信息的确会对我们有重要影响。我该如何找到我要去的地方?企业
如何跟踪其移动资产?政府如何实施道路收费系统?公交车应该在何时
何地触发下一个红绿灯?位置信息潜在的应用和使用似乎是无止境的。
对人类而言,我们在这颗蓝色星球上的位置始终都是一件极为重要的事
情,而今天获得我们的准确位置已容易得令人难以置信。
在近年来最令人眼花缭乱的技术进步中,卫星导航或全球导航卫星
系统(GNSS)技术发展可谓突飞猛进。在短短几年内,卫星导航从科幻层面变为科学现实,形成了一个充满活力、快速成长的产业,为全世界
客户提供了迅速可靠、随需随用的定位技术。
作为这个引人入胜、生机勃勃的行业的领军者,u-blox AG团队秉
承创新和质量理念致力于为卫星导航爱好者提供服务。作为客户服务承
诺的一部分,u-blox很荣幸地为您提供这本帮助您进入非凡的卫星导航
世界的著作。
本书旨在提供对卫星导航系统的功能及其应用的综合概览,同时审
视当前的研发水平、变化和进展。本书是为对此项技术感兴趣的用户和
与卫星导航应用有关的专家而编写的。本书在结构上由浅入深,读者能
够从简单的事实过渡到较为复杂的概念。既介绍了卫星导航的基本理
论,又补充了一些其他的重要内容。本书还可为了解此项技术提供一些
额外帮助,尤其是在现有的卫星导航接收机、模块和集成电路方面。重
要的新进展将在各个章节加以介绍。要了解GNSS设备目前所使用的各种
坐标系并非易事,为此专门用一个独立的章节介绍地图学。
我们希望本书能够对您有所帮助,而您也能像我们一样热衷于与定
位有关的技术。这个能够回答“我身在地球何处?”的世界和产业的确
是魅力无穷。自序 1990年,我从瑞士库尔乘火车到布里格。为打发旅途中的时间,我
随身带了几本旅行杂志。当我翻阅一本美国杂志时,不经意间看到了一
篇介绍有关新的卫星定位和导航系统的技术文章。这种新系统称为全球
定位系统或GPS,利用一些美国卫星来确定全球任意一点的位置,精度
约为100m [1] 。
作为一名热爱运动的运动员和登山者,我有很多次在危险的情况下
由于对所处的地区不了解而放弃。因此,这种即便在雾中或是夜间都能
通过GPS接收机确定我所处的位置的革命性的前景深深地吸引了我。
GPS开始占据我的生活。我还唤起了我所在学校里大批热衷此项技
术的学生们的热情,他们最终花费了数个学期并在此科目上毕业。我感
到自己已逐渐成为这个学科真正的专家,开始为各类出版物撰写有关
GPS的技术文章。
为何要阅读本书?
要想了解卫星导航的许多新兴和迷人的潜在应用的发展,需要先了
解这些系统工作的方式。如果你熟悉该系统的技术背景,就能够开发和
使用新的定位和导航设备。本书既探讨了可行性,也探讨了该系统的一
些限制,以便你抛开不切实际的期望。
本书是怎样诞生的?
2000年,我决定减少花在我所在大学授课上的时间,以便去了解商
业卫星导航产业的全貌。我希望能为直接从事卫星导航的公司工作,而
正好有一家名为u-blox AG的公司热情地接纳了我。u-blox AG要求我编
写一本送给客户的介绍材料,于是就有了这个由以往文章和新编章节组
成的概述。
真诚祝福
我真心地希望在全球卫星的导航下你的旅程一帆风顺,并深信借助这一迷人的技术领域你能引领自己踏上成功之路。愿你在阅读中获得乐
趣!
如果你有疑问或发现书中有误,请发送邮件到GPScompendium@u-
blox.com与我们联系。
Jean-Marie Zogg
2009年2月 [1] 那是在1990年,而现在定位数据的精度已达5~10m!导论 卫星导航是一种通过全球导航卫星系统(GNSS)精确测定地球上任
何一点的位置和时间的方法。目前,卫星导航接收机可供个人定位、商
业定位、导航、勘测和测定精确时间之用,用作个人、休闲和商业方面
的用途也日渐增多。
使用GNSS可在地球表面上的任何一点精确测定以下数值(见图
1):
图1 卫星导航的基本功能
(1)精确位置(经度、纬度和高度坐标),精度范围在20m到约
1mm之间。
(2)精确时间(协调世界时,即UTC),精度范围在60ns到约5ns
之间。
可由上述数值推导出行程(路径)的速度和方向,这些数值由围绕
地球运行的卫星提供。行程的速度也可通过多普勒频移测量直接确定。
截至2009年,美国国防部(DoD)研发和运营的全球定位系统
(GPS)是唯一全面运营的GNSS。高速发展的卫星导航产业以GPS为中心
迅猛成长,因此术语GPS与卫星导航有时可互换使用。本文着重介绍
GPS,同时也介绍和讨论其他一些新出现的GNSS。
GPS(该系统的全称为:授时与测距导航系统全球定位系统,即NAVSTAR-GPS),设计为军民两用。民用信号SPS(标准定位服务)可由
公众自由使用,而军用信号PPS(精确定位服务)只有经授权的政府部
门才能使用。首颗卫星于1978年2月22日入轨,计划在高度为20180km的
6个不同轨道平面内配置32颗围绕地球运转的卫星。卫星轨道与赤道之
间的倾角为55°,确保在地球上的任何一点至少可与4颗卫星进行无线
电通信。每颗卫星绕地球转一周约需12h,卫星上载有4个原子钟。
在GPS的研制过程中,重点放在以下三个方面:
(1)无论其是处于运动状态还是静止状态,它必须能够为用户提
供测定位置、速度和时间的能力。
(2)它必须具有连续性、全球性、全天候的高精度三维定位能
力。
(3)它必须具有民用潜力。
在此后的5~6年里,可能会有3个完全独立的GNSS投入使用。美国
将继续提供GPS服务,而俄罗斯的GLONASS和欧盟的GALILEO也将全面投
入运营。所有这些系统都将进行更新和改进,以提高可靠性并实现新的
潜在服务和应用 [1] 。
本概述将探讨卫星导航的基本原理,进而介绍具体应用和技术。作
为先驱和行业标准的GPS因其重要性而受到特别关注,而对于差分
GPS(DGPS)、辅助GPS(AGPS)以及设备接口等这些重大的发展,将在
单独的章节加以介绍。这样安排的目的是为了让读者打下牢固的基础,以了解这一令人着迷且日益重要的领域。
[1] 这里面将有一些重要的航空学进展,其中包括通过卫星导航来实现进场和着陆。第1章 卫星导航快速入门 你是否想了解……
○如何用简单的方法测定闪电的距离
○卫星导航的基本原理是什么
○GPS卫星上有多少个原子钟
○如何在平面上确定位置
○为什么通过卫星导航测定位置需要4颗卫星
如果是这样,你应该阅读本章!
1.1 测量信号传输时间的原理
几乎可以肯定,你在某个雷雨期间曾经尝试计算与电闪雷鸣之间的
距离。这个距离计算起来相当容易(见图1-1):距离=从看到闪电(起
始时间)直至听到雷声(终止时间)的时间乘以声音的速度(约为
330ms)。起始时间与终止时间之差就是信号行程时间。在此情况下,信号为在空气中传播的声波。
图1-1 确定闪电的距离
距离=行程时间×声速
卫星导航的原理与此相同,是通过与位置已知的参考卫星的距离来计算自身的位置。在此情况下,可根据从卫星上发送的无线电波的行程
时间计算距离。
1.1.1 卫星导航的基本原理
卫星导航系统均使用相同的基本原理来测定坐标:
●位置已知的卫星发送规则时间信号。
●根据测量出的无线电波(以光速c=300000kms穿越空间的电磁信
号)行程时间来计算接收机的位置。
我们可以通过一个简单的模型更清楚地了解这一原理。假设我们坐
在汽车里,需要在一个又长又直的街道上确定我们的位置。在街道的终
点有一部无线电发射机,每秒发送一个时间信号脉冲。我们在汽车上携
带了一台时钟,它与发射机上的时钟同步。通过测量从发射机到汽车消
耗的行程时间,就能计算出我们在街道上的位置(见图1-2)。
图1-2 通过测量行程时间测定距离的最简单的例子
距离D可通过行程时间Δτ乘以光速c得出。
D=Δτ・c
由于我们汽车上所载的时钟可能无法与发射机上的时钟精确同步,因而计算出的距离与实际行程距离会存在偏差。在导航中这个不真实的
距离被称为伪距。在本例中,1微秒(1μs)的行程时间误差产生了300m的伪距。
为我们的汽车配备一台精确的原子钟可以解决这一问题,但这可能
会超出我们的预算。另一个解决方案需要使用第二部同步时间信号发射
机,它与第一部发射机的间距(A)是已知的。即使车载时钟不够精
确,通过测量两个行程时间也能准确地计算距离(D)。
图1-3 使用两部发射机时,即使存在时间误差也能计算出准确位置
我们可以看出,为了能够精确地计算在一条直线(沿一个维度方向
延伸所确定的一条直线)上的位置和时间,我们需要两部时间信号发射
机。由此我们可以得出以下结论:如果在计算位置时采用的车载时钟不
同步,时间信号发射机的数量需要比未知维度的数量多一个。
例如:
●在一个平面上(沿两个维度延伸)我们需要3部时间信号发射
机。
●在三维空间里我们需要4部时间信号发射机。
卫星导航系统使用卫星作为时间信号发射机。为测定3个所需坐标
(经度、纬度和高度)和精确的时间,至少需要与4颗卫星通信(见图1-4)。我们在下节将对此加以详细说明。
图1-4 确定经度、纬度、高度和时间需要4颗卫星1.1.2 信号行程时间
卫星导航系统中的卫星采用较高的轨道围绕地球运转,并且其分布
方式使地面上的任意一点至少可以直接看到4颗卫星。
这些卫星全都配备有星载原子钟。原子钟是已知最精确的时间计量
仪器,每30000至1000000年的最大误差不超过1s。为使它们更加精确,从地球上的各个控制点定期对其进行调整或同步。GNSS中的卫星向地球
发送其精确位置及其时钟时间。这些信号以光速(300000kms)传播,到达地球表面卫星正下方的位置大约需要67.3ms。信号每多行进1km需
要额外的3.33ms。只需一部接收机和一台精确的时钟就可以计算位置。
通过将卫星信号到达的时间与发送该信号时星载时钟的时间进行比较,就能够测定信号的行程时间(见图1-5)。
图1-5 确定信号行程时间
如同上文汽车的例子,与卫星之间的距离D可通过已知的信号行程
时间Δτ确定:
距离=行程时间×光速
D=Δτ・c1.1.3 测定位置
设想一下你正在穿越广阔的高原,想知道自己身处何处。两颗卫星
正在你上方的远处围绕地球运转,并发送它们的星载时钟时间和位置。
根据测得的这两颗卫星的信号行程时间,你可以绕着卫星以D1 和D2 为
半径画两个圆。每个半径分别对应于计算出的与卫星之间的距离。相对
于卫星的所有可能位置均在这两个圆上。如果将高于卫星的位置去掉,接收机的位置就在卫星下方两圆的交点处(见图1-6)。因此,在XY平
面只需两颗卫星就足以测定位置。
图1-6 接收机的位置为两圆的交点
在现实世界中,需要在三维空间而不是在平面内测定位置。由于平
面与多出了一个维度(高程Z)的三维空间之间的差别,测定真实位置
需要用到额外的第三颗卫星。如果已知与这3颗卫星的距离,所有可能
的位置就在3个分别以计算出的距离为半径的球面上。该位置是所有3个
球面的交点(见图1-7)。图1-7 位置由所有3个球面的交点确定1.1.4 时间误差的影响和修正
只有接收机与卫星上的星载原子钟同步,也就是在可精确测定信号
行程时间的情况下,上节中的结论才能成立。即便卫星到地面上导航接
收机的行程时间测量相差只有1μs,也会造成300m的位置误差。由于所
有GNSS卫星的星载时钟都是同步的,在3次测量中的信号行程时间误差
量是相同的。此时我们可以求助于数学。
我们知道,如果进行含有N个未知变量的数学计算,我们需要用N个
独立的方程来表示它们。如果时间测量伴有不变的未知误差(Δt),在三维空间里我们将有4个未知变量:
●经度(X);
●纬度(Y);
●高程(Z);
●时间误差(Δt)。
这4个变量需要4个方程,而这组方程可从4颗相互独立的卫星得
到。
构建卫星导航系统时,有意将其设计成在地球上的任意一点至少可
以“看到”4颗卫星(见图1-8)。因此即便接收机一方的时钟不准确造
成时间误差,计算出的位置精度仍可达到5~10m。图1-8 在三维空间里测定位置需要4颗卫星第2章 坐标系 如果你想了解……
○地球体是什么
○为何地球基本上被视为椭球
○为何世界上使用的各种地图参考系超过200个
○WGS-84指的是什么
○如何将一种基准面转换为另一种
○笛卡儿坐标和椭球坐标是什么
○各国的地图是如何绘制的
○如何由WGS-84坐标计算出国家坐标
如果是这样,你应该阅读本章!
2.1 引言
使用GNSS时的一大难题是世界上存在着大量各不相同的坐标系。因
此,测量和计算出的位置并非总是能与假定的位置相对应。
为了理解GNSS是如何工作的,需要了解测绘学的一些基础知识:这
是一门对地球表面进行测量和制图的科学。如果没有这些基础知识,就
难以理解将适当的地图参考系(基准面)和坐标网组合在一起的必要
性。其中涉及到要从100多个不同的基准面以及10个左右的不同坐标网
中进行选择。如果组合不当,位置可能会偏离数百米。2.2 地球体
自哥伦布时代起人们就已经知道地球是圆的。但地球究竟有多圆?
描述我们这个蓝色星球的外形一直是一项充满挑战的科学工作。数百年
来,提出了若干个不同的模型以尽可能真实地表述地球的近似真实外
形。
地球体代表了地球的真实外形,平均海平面的零点即为其表面。该
表面由地球重力所决定,因而其几何描述极其复杂。研究人员借用了希
腊文中的地球一词,将该表面的几何外形称为地球体(Geoid)(见图
2-1)。
图2-1 地球体是地球表面的近似外形
由于地球质量分布不均,造成海洋的水准面并不在几何外形的表面
上,因而采用了与之相似的椭球。地球体与地球真实外形的差别在于它
是理论形体,表面各处均以适当的角度嵌入了重力场线。
地球体通常用作测量高度的高程基准。例如,瑞士测量高度的基准
点是日内瓦港的“Repère Pierre du Niton”(RPN,即皮埃尔杜镭射
气地标,373.600m)。该高程源自相对于马赛港(平均海拔0.00m)的
点对点测量。2.3 椭球与基准面
2.3.1 椭球
在进行计算时,地球体是难以处理的形体。因此在进行日常的测量
工作时需要一种简单、便于定义的外形。这种用作替代的表面就是椭
球。如果一个椭圆的表面绕其对称的南北极轴线旋转,就会得到一个椭
球体(见图2-2)。
椭球由两个参数确定:
●长半轴a(位于赤道面);
●短半轴b(位于南北极轴)。
椭球与理想球体的外形偏差量称为扁率(f)。
图2-2 生成椭球2.3.2 制定本地参考椭球与基准面
2.3.2.1 本地参考椭球
在处理椭球时必须小心,以确保自然垂线不是垂直嵌入到椭球上,而是地球体上。因此标准椭圆与自然垂线并不一致,两者之差代表
了“垂直偏差”(见图2-4),也就是说,地球表面上的点的投影会不
正确。为尽量减小这一偏差,各国发展了各自制定的非地心椭球作为基
准面用于测量工作(见图2-3)。在选择长半轴a、短半轴b以及中点
时,尽量使地球体和椭球能与各国的版图精确匹配。
图2-3 制定本地参考椭球2.3.2.2 基准面、地图参考系
依据某些类型的椭球制定的国家或世界地图参考系称为基准面。在
使用GNSS接收机导航时,根据所使用地图的不同,应确保相关地图参考
系已输入到接收机中。
目前可供使用的地图参考系超过120个,例如:瑞士的CH-1903、北
美的NAD83以及作为国际标准的WGS-84。
椭球非常适合于描述用经度和纬度表示的点的位置坐标。高程信息
要么基于地球体,要么基于参考椭球。测得的正高H(基于地球体)与
基于参考椭球的椭球高程h之差称为大地水准面起伏N(见图2-4)。2.3.3 国家参考系
整个欧洲都使用了各不相同的参考系,并且在测量过程中技术上使
用的各种参考系都有各自的名称。其中一些基础的非地心椭球如表2-1
所示。如果使用的椭球相同,则按其本地基准所对应的不同国家加以区
分。
图2-4 地球体与椭球之间的差异2.3.4 国际参考椭球WGS-84
GNSS接收机所进行的详细显示和计算主要涉及WGS-84(世界测地系
统1984)参考系。WGS-84坐标系依据地球中心进行位置标定。该系统称
为ECEF(以地球为中心,地球固定不动)。WGS-84坐标系为三维右旋笛
卡儿坐标系,坐标原点位于约等于地球总质量的椭球的质心(相当于地
心)。
椭球的X轴正向(见图2-5)位于赤道面(由赤道包围而成的假想平
面)上,自质心经过赤道与格林尼治子午线的交点(零子午线)。Y轴
也在赤道面上,相对于X轴向东偏转90°。Z轴与X轴和Y轴垂直,经过地
理北极。
WGS-84椭球的参数如表2-2所示。
通常采用椭球坐标(φ,λ,h)而不是笛卡儿坐标(X,Y,Z)来
做进一步处理(见图2-6)。φ对应纬度,λ对应经度,h对应椭球高度
(例如,椭球上的P点对应的椭球坐标(φ,λ,h))。
图2-5 笛卡儿坐标系示意图图2-6 椭球坐标系示意图2.3.5 从本地参考系变换至世界参考椭球
2.3.5.1 大地基准面
参考系通常为本地参考系,而不是地心椭球参考系。本地参考系
(如CH-1903)与全球、地心系统(如WGS-84)之间的关系称为大地基
准面。如果本地参考系与全球椭球参考系的坐标轴平行,或者在某个局
部区域可视为平行,则基准面变换所需的全部要素为3个位移参数,称
为基准面位移常数ΔX、ΔY及ΔZ。
还可能需要加入三个旋转角φx 、φy 、φz 以及一个比例系数
m(见图2-7),因此全部变换公式含有7个参数。大地基准面指定了本
地三维笛卡儿坐标系相对于全球坐标系的位置。
表2-3给出了各种基准面参数的示例。其他数据可从以下注明的出
处获得 [1] 。
图2-7 大地基准面[1] http:www.geocities.commaprefmapref.html2.3.5.2 基准面转换
根据定义,基准面转换是指将一个三维笛卡儿坐标系(如WGS-
84),通过三维平移、旋转和拉伸转换为其他坐标系(如CH-1903)。
为实现转换,大地基准面必须是已知的。详尽的转换公式可从专业文献
[1] 处获得,也可以通过互联网直接进行转换 [2] 。完成转换后,可将
笛卡儿坐标变换为椭球坐标。
[1] B.Hofmann-Wellenhof:《GPS实践》,Springer-Verlag,维也纳,1994年,ISBN 3-211-
82609-2
[2] 联邦地形办公室:http:www.swisstopo.ch2.3.6 转换坐标系
2.3.6.1 将笛卡儿坐标转换为椭球坐标
笛卡儿坐标和椭球坐标可从一种表述转换为另一种。由于φ和h出
现在以下方程的右侧,这些方程还须经过反复推导才能得到精确解。2.3.6.2 将椭球坐标转换为笛卡儿坐标
可将椭球坐标转换为笛卡儿坐标。
x=[RN +h]・cosφ・cosλ
y=[RN +h]・cosφ・sinλ
z=[RN ・[1-e2 ]+h]・sinφ2.4 平面地区坐标、投影
通常军事测量采用椭球坐标经度λ(相对于参考椭球)、纬度φ和
高程(相对于椭球或地球体)来描述地球表面点P的位置。
由于椭球上的大地计算(例如,两幢建筑物之间的距离)在数值处
理上非常繁琐,测量技术的习惯做法经常是将椭球投影到平面上。这就
产生了位于平面、右旋的X和Y地区坐标。大部分地图都绘有网格,以便
在野外方便地找到某个地点。对于平面地区坐标,可以在计算平面内建
立测量参考椭球的椭球坐标映射(投影)。椭球在平面内的投影无法做
到不变形。但适当选择投影方式使变形量降至最低是可能的。通常的投
影处理有圆柱投影、墨卡托投影、高斯-克吕格投影和UTM投影。如果将
位置信息与地图资料结合使用,还必须注意绘制地图所使用的参考系和
投影方式。
2.4.1 高斯-克吕格投影(横切墨卡托投影)
高斯-克吕格投影是一种等角横切墨卡托投影,只适用于有限的区
域或局部。用一个椭圆形圆柱体包围地球的旋转椭球(如贝赛尔椭
球),圆柱面沿椭球中央子午线(对于需绘图区域的一条重要子午线,例如经度为9°的子午线)的整个经线以及两极与其相接。圆柱体位置
相对于椭球体为横切,例如:旋转90°(见图2-8)。为使经线和面积
变形最小,在旋转椭球上采用经差为3°的区域进行投影。该区域的宽
度沿中央子午线不变。根据地区的不同,采用不同的中央子午线(例如
6°、9°、12°、15°)。图2-8 高斯-克吕格投影
沿南北方向的数值按与赤道的距离计算。为避免沿东西方向出现负
值,允许中央子午线西移500000m(偏移)。中央子午线的经度数可以
被3整除,并取整数部分的值。
例如位置为:
椭球坐标:N:46.86154°E:9.51280°
高斯-克吕格(中央子午线:9°):N-S:5191454 W-E:3539097
该位置距离赤道5191454m,距离中央子午线(9°)39097m。2.4.2 UTM投影
与高斯-克吕格投影相比,UTM(通用横轴墨卡托)坐标系将整个地
球表面投影到60×20=1200个平面上。旋转椭球在横切圆柱体上的实际
投影过程与高斯-克吕格投影相同。
UTM坐标系通常以WGS-84椭球为基础。但它只定义了投影和坐标
系,而未定义参考椭球和大地基准面。
UTM坐标系将全世界划分成经差为6°的区域(见图2-9)。这些区
域从西经180°开始至东经180°结束,依次从1至60进行编号。如果区
域1从西经180°延伸到西经174°,则区域1的中央子午线为西经
177°;如果区域2从西经174°延伸到西经168°,则区域2的中央子午
线为西经171°,依此类推。
图2-9 (60个之中的)某个区域投影原理
各投影区域的中央子午线分别为东经和西经3°、9°、15°、21°、27°、33°、39°、45°、51°、57°、63°、69°、75°、81°、87°、93°、99°、105°、111°、117°、123°、129°、135°、141°、147°、153°、159°、165°、171°、177°(见图2-
10)。图2-10 采用UTM投影的区域划分(带示例)
在南北方向(至极点)上进行分区(除纬度为8°的带状区域
外),从字母C开始标识,但仅适用于北纬84°至南纬80°的区域。南
纬72°至南纬80°被指定为C区,南纬64°至南纬72°为D区,依此类
推。但北纬72°至北纬84°的区域为X区。其经差为12°。
在高斯-克吕格投影中,该点到赤道的距离等于其以千米为单位的
南北方向的数值。为避免在南半球出现负值,赤道的数值被指定为
10000000m。
东西方向的数值为该点与中央子午线之间的距离,中央子午线的数
值(与高斯-克吕格投影一样)被指定为500000m。
UTM坐标与WGS-84坐标的示例分别如下:
WGS-84:N 46.86074° E 9.51173°
UTM:32T 5189816(N-S) 0539006(W-E)2.4.3 瑞士投影系(正形双重投影)
可通过两个步骤将贝塞尔椭球(Bessel ellipsoid)正形投影到平
面上,也就是说能够保持角度不变。首先将椭球正形投影到球体上,然
后再通过斜圆柱投影将球体正形投影到平面上。该过程称为双重投影
(见图2-11)。在椭球上平面内的一个主点(伯尔尼的古观象台)固定
为坐标系原点的投影(偏移:YOst =600000m,XNord =200000m)。
图2-11 双重投影原理
在瑞士的地图上(例如,比例尺为1:25000)有两类不同的坐标信
息:
●投影到平面带有网格的地区坐标(以km表示的X和Y)
●相对于贝塞尔椭球的地理坐标(以(°)、(′)、(″)表示
的经度和纬度)
在发布位置坐标时,来自4颗卫星的信号传输时间必须已知。只有
这样,经过相应的计算和转换,才能以瑞士陆上测量坐标发布位置(见
图2-12)。
图2-12 从卫星到位置2.4.4 全球范围的坐标转换
互联网为在各种坐标系之间转换坐标提供了多种可能性。
2.4.4.1 示例:将WGS-84坐标转换为CH-1903坐
标
(选自《参考系实践》,作者Urs Marti和Dieter Egger,瑞士联
邦地形办公室)
精度在1m以内!
1.经度和纬度转换
需要将WGS-84的经度和纬度数据转换为60′进制。
示例:
(1)纬度值(WGS-84)46°2′38.87″转换后为165758.87″。该
数值用B表示:B=165758.87″
(2)经度值(WGS-84)8°43′49.79″转换后为31429.79″。该
数值用L表示:L=31429.79″
2.计算辅助数值
示例计算结果:Φ=-0.326979
Λ=0.464729
3.横坐标计算(东-西方向)计算:y
y[m]=600072.37+(211455.93×Λ)-(10938.51×Λ×Φ)-
(0.36×Λ×Φ2 )-(44.54×Λ3 )
示例:y=700000.0m
4.纵坐标计算(南-北方向):x
x[m]=200147.07+(308807.95×Φ)+(3745.25×Λ2 )+(76.63×Φ2 )-(194.56×Λ2 ×Φ)+(119.79×Φ3 )
示例:x=100000.0m
5.高程H计算:
H[m]=(HeightWGS-84 -49.55)+(2.73×Λ)+(6.94×Φ)
示例:
HeightWGS-84 =650.60m时转换后的结果为:H=600m2.5 栅格地图地理对位
2.5.1 引言
地理对位是指将栅格地图(源)变换为矢量地图(图像)。在栅格
地图中,各点的位置以像素坐标(X,Y)表示,可存储为各种数据格
式,如.JPG.BMP.GIF或者.PNG。这些地图可通过卫星照片或将地图扫描
成计算机文件来获得。在矢量地图中,各点的位置由地理坐标(X′,Y
′)确定。通过适当的数学变换,可将栅格地图变换为带地理坐标系的
矢量地图(见图2-13)。本节将介绍这一变换过程。
图2-13 使用像素坐标X、Y的栅格地图(左图)和使用地理坐标X′、Y′的矢量地图(右图)2.5.2 变换基础
通过仿射变换几何规则可将栅格地图变换为带坐标系的矢量地图,也称为线性变换。该过程仅适用于对方圆数千米的地图小块区域进行变
换。在坐标变换过程中,源坐标系(X,Y)被变换为其他的坐标系(X
′,Y′)。2.5.3 确定变换坐标
代数表示为(其定义见图2-14):
X′=a・X+b・Y+c
Y′=d・X+e・Y+f
图2-14 源点的定义
矩阵表示为:2.5.4 确定变换参数a,b,c,d,e,f
6个变换参数(a,b,c,d,e,f)必须定义成3个坐标对(定标
点)。为计算这6个参数,必须求解含有6个未知变量的6个方程。确定
变换参数(a,b,c,d,e,f)的公式推导分为3个步骤。
1.图像定标
在地图上选出3个均匀分布的定标点(见图2-15)。确定这些定标
点的源坐标(X,Y)和变换后的坐标(X′,Y′)。
图2-15 3个定标点必须在地图上均匀分布
定标坐标为:
X1 ,Y1 ,X1 ′,Y1 ′
X2 ,Y2 ,X2 ′,Y2 ′
X3 ,Y3 ,X3 ′,Y3 ′
(2-1)
2.建立变换方程
将公式(2-1)重新整理为所有6个变换后的坐标:
X1 ′=a・X1 +b・Y1 +c
Y1 ′=d・X1 +e・Y1 +f
X2 ′=a・X2 +b・Y2 +c
Y2 ′=d・X2 +e・Y2 +fX3 ′=a・X3 +b・Y3 +c
Y3 ′=d・X3 +e・Y3 +f
(2-2)
则方程(2-2)可以用以下矩阵形式表示:
3.确定变换参数a,b,c,d,e,f
向量(a,b,c,d,e,f)是我们需要求解的,可通过对方程(2-
3)进行推导整理得出。2.5.5 示例(将栅格地图变换为WGS-84)
我们将对以下地图(见图2-16)进行地理对位。定标采用了3个参
考点。
图2-16 带有3个定标点[6]
的栅格地图
根据方程(4)确定变换参数:确定位置坐标:
图2-17 确定位置,该点像素坐标为X=643和Y=370
通过以下公式:
X′=a・X+b・Y+c
Y′=d・X+e・Y+f
得出X′和Y′的地理坐标如下:
经度X′=-1.883248°,纬度Y′=42.69659°图2-18 通过Google Earth验证计算出的地理坐标[7]第3章 卫星技术基础
3.1 开普勒定律
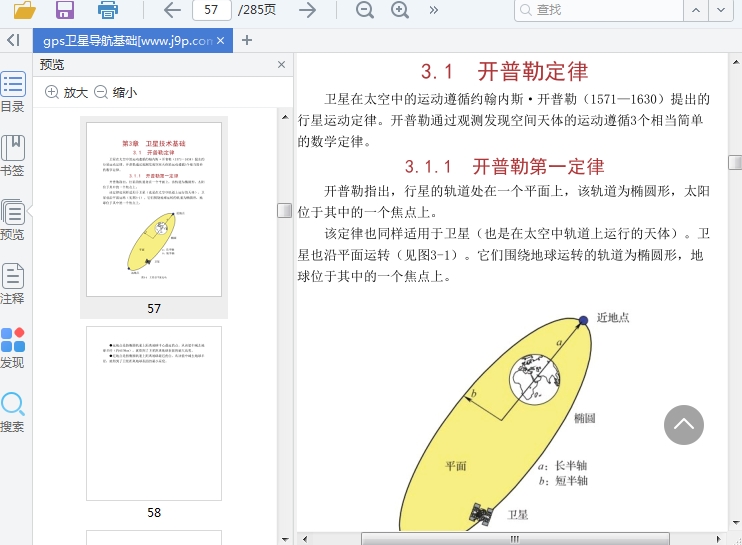
卫星在太空中的运动遵循约翰内斯・开普勒(1571―1630)提出的
行星运动定律。开普勒通过观测发现空间天体的运动遵循3个相当简单
的数学定律。
3.1.1 开普勒第一定律
开普勒指出,行星的轨道处在一个平面上,该轨道为椭圆形,太阳
位于其中的一个焦点上。
该定律也同样适用于卫星(也是在太空中轨道上运行的天体)。卫
星也沿平面运转(见图3-1)。它们围绕地球运转的轨道为椭圆形,地
球位于其中的一个焦点上。
图3-1 卫星沿平面运动●远地点是指椭圆轨道上距离地球中心最远的点。从该值中减去地
球半径(约6378km),就得到了卫星距离地球表面的最大高度。
●近地点是指椭圆轨道上距离地球最近的点。从该值中减去地球半
径,就得到了卫星距离地球表面的最小高度。3.1.2 开普勒第二定律
第二定律的表述是:“连接行星和太阳的直线在相等的时间间隔内
扫过的面积相等 [1] 。”这条定律也被称为等面积定律。
对卫星而言,这意味着连接卫星和地球的直线在相等的时间间隔内
扫过的面积相等。因此,如果时间Tv_1和Tv_2相等,则面积A_1和A_2也
相等(见图3-2)。
[1] 《开普勒第二定律》,Jeff Bryant和Oleksandr Pavlyk著,沃尔夫勒姆演示项目。3.1.3 开普勒第三定律
第三定律指出,行星轨道周期的平方与轨道长半轴的立方成正比。
这表明较大的天体轨道较长,而且轨道较长的行星的速度要低于轨道较
短的行星的速度:
对所有的行星都是常数。
其中,P为轨道周期,a为椭圆轨道的长半轴。
由此定律可推导出高出地球表面的卫星轨道高度(h)(见图3-3)
为:
Re :地球半径(6378.137km);
P:卫星环绕地球的轨道周期。
图3-2 开普勒第二定律图解图3-3 确定卫星的轨道高度(h)3.2 卫星轨道
轨道描述了卫星在太空中的位置。用于导航的卫星不停地围绕地球
沿圆形或椭圆形轨道运转。空间定位(如轨道倾角、偏心率、长度、距
地面高度)及运动参数(如轨道周期)对这些卫星的可用性和性能有着
显著影响(见图3-4)。
●倾角是指倾斜的角度或轴倾角,表示围绕地球运转的卫星的圆形
或椭圆形轨道相对于赤道平面的倾斜程度。例如,倾角为90°的轨道将
从极区正上方经过。所有不在赤道平面内的卫星轨道都被称为“倾斜轨
道”。
图3-4 卫星轨道
●卫星的星历是对其轨道的数学描述。接收机需要高精度的卫星轨
道数据,以便在任意给定时间计算卫星在太空中的准确位置。降低了精
度的轨道数据称为年历(见图3-5)。在年历的帮助下,接收机可计算
出在地平线上可见的卫星的大致位置和时间。每颗卫星都发送自己的星
历和所有现有卫星的年历。当前的年历数据也可通过互联网查看 [1] 。图3-5 年历
●仰角描述卫星相对于地平面的角度。如果卫星直接经过观测点上
方,则仰角为90°。如果卫星处在地平线上,则仰角为0°。
●方位角是指参考平面与某个点之间的角度。就卫星而言,参考平
面为地平线所在的、指向正北方向的平面。方位角为卫星与正北方向
(北=0°,东=90°,南=180°,西=270°)的夹角。
图3-6 方位角
●偏心率定义了所谓的数值偏心率“e”,表示椭圆卫星轨道(偏心轨道)相对于几何圆形轨道的偏差。数值偏心率按以下公式确定:
其中,a为椭圆轨道的长半轴,b为短半轴(见图3-1)。对于圆形
轨道,e=0;e越接近1,椭圆的长度(即长半轴)相对于短半轴就拉得
越长。
[1] http:www.navcen.uscg.govgpsalmanacs.htm3.3 轨道高度
轨道高度是圆形或椭圆形卫星轨道上的某一点距地球表面的高程。
最初,商业通信卫星被优先送入圆形赤道(倾角为0°)轨道,高度约
为距地面36000km。在该轨道上的卫星24h绕地球一周(轨道周期:
24h),因此其相对于地球是静止的。因此,这类卫星也被称为地球同
步(GEO)卫星,其轨道被称为地球同步轨道。地球同步卫星被用于
Inmarsat、Thuraya之类的通信卫星系统,以及WAAS、EGNOS之类的SBAS
系统(参见7.5.1节)。
除了轨道高度相对较高、可覆盖地球表面广大地区的地球同步卫
星,其他卫星系统(例如Iridium、Globalstar、GPS和GALILEO)采用
的卫星轨道高度要低得多。这些轨道高度较低的卫星必须提高环绕地球
的速度以提供必要的离心力,用来补偿低高度带来的增大的地心引力。
与地球同步卫星相比,这些卫星在称为非地球同步卫星轨道(NGSO)上
围绕地球运动和旋转。
通常将卫星轨道分为六类:
●地球同步轨道(GEO):与地球同步的轨道,高度约为36000km;
●中地轨道(MEO):中高度(约10000km)倾斜轨道;
●低地轨道(LEO):低高度(不到1000km)轨道;
●高(倾斜)椭圆轨道(HEO);
●倾斜地球同步轨道(IGSO);
●极地轨道(PEO):经过极区的LEO轨道。
示例1:确定地球同步卫星的高度。
地球同步卫星的轨道高度非常精确,可通过计算得出。
地球平均恒星日 [1] 为23h56min4.099s=86164.099s,表示在固定
的恒星系内地球自转360°所需的时长。
根据第3.1.3节中给出的公式:=35786035m=35786.035km
示例2:确定GPS卫星的轨道周期。
GPS卫星采用中等高度的轨道,距地面的高度为20184.5km。GPS卫
星的平均轨道周期可按以下公式确定:
这个时间相当于半个恒星日。由于地球也同样在旋转,因此当GPS
卫星运转两周后将通过地球上空的同一点。
[1] 相对于位置固定的恒星。3.4 无线电频率
基于卫星的导航信息发送以及在不同的系统部分之间通过无线电广
播进行的通信有:
●用户链路:卫星与用户之间(如用户终端);
●馈线链路:卫星与地球上的中心站之间(如地面站、控制站);
●星际链路:太空中的卫星之间(直接通信,无须通过地面站)。
根据发射方向区分:
●上行(上行链路,也称反向链路):从卫星传输站(地面站和
或用户终端)“向上”发送至卫星。例如:用户上行链路,移动用户终
端的发送方向。
●下行(下行链路,也称正向链路):从卫星“向下”发送至卫星
传输站。
卫星发射频率由国际电联(ITU)的国际无线电会议(WRC)负责分
配和管理。表3-1给出了ITU-RV.431-7所规定的用于卫星通信和导航的
典型微波电磁发射频率。3.5 时间系统
时间在基于卫星的定位中扮演了重要角色。GPS可分为5个重要的时
间系统。
3.5.1 国际原子时(TAI)
国际原子时标(国际原子时,TAI)是为了形成统一的“绝对”时
标而建立的,它可同时满足各种用途的不同物理要求。其中的用途之一
是GPS定位,时标在里面起到非常重要的作用。
自1967年起,秒被定义为原子物理常数。非放射性元素铯(133
Cs)被选作基准。铯原子选定能级之间的谐振频率被规定为
9192631770Hz。以此定义的时间成为SI计量系统(国际单位制)的一部
分。原子时的起点被设定为1958年1月1日0时0分。3.5.2 协调世界时(UTC)
引入协调世界时(UTC)是为了提供以原子时为基础可用于地球现
实世界时间的时标。协调世界时以前称为格林尼治标准时间(GMT)或
世界时 [1] 。
协调世界时与国际原子时的差别在于秒的计数上,即UTC=TAI-n,其中n等于所有累加的秒数,可在每年12月31日和6月30日结束时增加
(闰秒)。闰秒因其反映了地球自转变缓趋势而非常必要,并能对时钟
进行修正以保持时间的统一和精确。
[1] http:www.bipm.orgenscientifictaitime_server.html3.5.3 GPS时
通常GPS系统时间被表述为星期数及该星期已消逝的秒数。其起始
日期为1980年1月6日星期日0时0分(UTC)。每个GPS星期开始于星期六
与星期日之间的午夜,此时由主控站的母钟提供连续时标。GPS时与协
调世界时之间的时差被连续处理并包含在导航信息中。GPS时与协调世
界时的区别在于所有累加的秒数(2009年GPS时间与协调世界时相差
15s)以及对秒的划分。GPS控制站保持GPS时的秒标记与协调世界时相
差不超过1μs。GPS时与协调世界时的时差和GPS导航信息(参见4.6
节)在子帧4中一同发送。3.5.4 卫星时
由于GPS卫星所载原子钟固有的和不规则的频率误差,各卫星的时
间会与GPS系统时间存在偏差。控制站对卫星时钟进行监控,并通知任
何观察到的时差。在进行本地GPS测量时应考虑时间偏差。3.5.5 地方时
地方时是指特定地区或区域所使用的时间。地方时与协调世界时的
关系由时区及有关标准和夏令时的规定确定。
表3-2给出了2009年7月9日记录的瑞士地方时示例。
以下时间值在2009年内有效:
●国际原子时-协调世界时=+34s
●GPS时-协调世界时=+15s
●国际原子时-GPS时=+19s第4章 GNSS技术:GPS示例 如果你想了解……
○为何需要三个不同的GPS部分
○每个独立的部分有哪些功能
○GPS卫星的基本组成是什么
○哪些类型的信息被发往地球
○卫星信号是如何生成的
○卫星导航系统信号行程时间是如何确定的
○相关性是指什么
○为何连线GPS需要最小时间周期
○什么是帧和子帧
如果是这样,你应该阅读本章!
4.1 引言
所有的GNSS都采用相同的原理工作。在后面几节我们将通过具体考
察GPS来探讨GNSS的不同技术部分。GPS是GNSS技术的先行者,也是唯一
投入全面运营的全功能GNSS。GPS和GNSS通常可互换使用,尽管GPS具体
指的是由美国国防部发展、美国空军第50航空联队(Air Force 50th
Space Wing)管理的授时与测距导航系统全球定位系统。GPS于1993年
开始全面投入运营 [1] 。[1] http:en.wikipedia.orgwikiGlobal_Positioning_System4.2 全系统描述
GPS由三个功能部分组成(见图4-1):
图4-1 GPS的三个组成部分
●空间部分(所有在轨工作的卫星);
●控制部分(所有与系统监控有关的地面站:主控站、监控站和地
面控制站);
●用户部分(所有民用和军用用户)。
从图4-1可以看出,空间部分与用户部分的通信是单向的。地面控
制站与卫星的通信是双向的。4.3 空间部分
4.3.1 卫星的分布和运动
GPS的空间部分由多达32颗工作卫星(见图4-2)组成,这些卫星在
6个不同的轨道平面上围绕地球运转(每个平面有4~5颗卫星)。这些
卫星的轨道高度距地面20180km,与赤道的夹角为55°。任何一颗卫星
均在12h内绕行一周。由于地球也在运转,卫星会在约24h(准确时间为
23h 56min)后重返其地面上空的出发位置(见图4-3)。
图4-2 GPS卫星在6个轨道平面上绕地球运转
在卫星有效作用范围内的任何位置均可接收到卫星信号。图4-3给
出了一颗位于赤道与零子午线交汇处上空的卫星的有效作用范围(阴影
区)。图4-3 某GPS卫星的24h轨迹及其有效作用范围
特定时间的卫星分布如图4-4所示。由于这种巧妙的分布模式和较
高的轨道高度,确保了在全球任何地点、任何时间至少可与4颗卫星进
行通信。
图4-4 2001年4月14日12时(协调世界时)GPS卫星的位置4.3.2 GPS卫星
4.3.2.1 卫星结构
所有的GPS卫星均使用星载原子钟来保持同步信号,这些信号以相
同的频率(1575.42MHz)发送。地面上接收到的最小信号强度为-158
~-160dBW [1] 。根据规定,最大信号强度约为-153dBW。
图4-5 GPS卫星
[1] 《全球定位系统,标准定位系统服务,信号规范》,第2版,1995年,第18页。
http:www.navcen.uscg.govpubsgpssigspecgpssps1.pdf4.3.2.2 通信链路预算分析
卫星与用户之间的链路预算分析(见表4-1)适用于制定所需的卫
星发射功率标准。根据规定,最小接收功率不得低
于-160dBW(-130dBm)。为确保符合该标准,使用CA码调制后的卫星
L1载波发射功率必须达到21.9W。接收机设计要考虑极化失配和天线接
收增益因素。这两个参数的总和可能会有较大的变化范围。根据设计的
不同,数值通常会在+5~-10dB之间。
根据规定,户外的GPS信号接收功率至少应
为-160dBW(-130dBm)。信号接收的最大谱功率密度应
为-190dBmHz(见图4-6)。热背景噪声下的谱功率密度约
为-174dBmHz(温度为290K)。因此最大信号接收功率约比热背景噪声
水平低16dB。4.3.2.3 卫星信号
卫星以50bits的速率发送以下信息(导航电文) [1] :
●卫星时和同步信号;
●精确轨道数据(星历);
图4-6 信号接收谱功率密度与热噪声
●用于确定精确卫星时的时间修正信息;
●所有卫星的近似轨道数据(年历);
●用于计算信号发送时间的校正信号;
●电离层数据;
●卫星的工作状态(健康状况)信息。
发送完所有上述信息所需的时间为12.5min。通过使用导航电文,接收机能够确定每个卫星信号的发送时间以及在发送时卫星的精确位置。
每颗GPS卫星都会发送为其分配的唯一签名。签名由1023个0和1组
成的伪随机噪声(PRN)码,广播历时1ms并连续重发(见图4-7)。
图4-7 伪随机噪声(PRN)
该签名码供接收机用于以下两方面:
●辨识:通过唯一的签名模式可识别出信号是由哪颗卫星发送的;
●信号行程时间测量。
[1] 《NAVCEN:GPS SPS信号规范》,第2版,1995年,http:www.navcen.uscg.govpubsgpssigspecgpssps1.pdf4.3.3 生成卫星信号
4.3.3.1 简化框图
在每颗卫星上均载有4台高精度原子钟,由其中一台原子钟的共振
频率生成以下工作所需的时间脉冲和频率(见图4-8和图4-9):
●50Hz数据脉冲;
●CA(粗捕获)码(频率为1.023MHz的PRN码广播),该码采用异
或操作(EXOR) [1] 调制数据并以2MHz带宽发送数据;
图4-8 简化的卫星框图图4-9 GPS信号的数据结构
●民用L1载波频率(1575.42MHz)。
由CA码调制的数据通过二进制相移键控(BPSK) [2] 依次对L1载
波进行调制。只要调制数据改变,L1载波相位就会改变180°。
[1] 一种对两个操作数的逻辑运算,如果操作数中有且只有一个操作数的值为真时,逻辑运算
值为真。
[2] 一种调制载波的方法,可将数据转换为0°180°载波相移。4.3.3.2 详细框图
卫星导航信号是通过一种称为DSSS(直接序列扩频)调制 [1] 过程
生成的。在该过程中,基准频率(不要与接收机的基带芯片混淆)以较
宽的带宽叠加到较高的频率信号上发射。扩频调制原理于20世纪40年代
由电影明星Hedy Lamarr和钢琴家George Anthell [2] 首先在美国提
出。即便在不利的环境下该过程仍能实现安全的无线电链路。
每颗GPS卫星都载有4台非常稳定的原子钟(稳定性优于20×10-12) [3] ,由其中一台原子钟的共振频率产生10.23MHz的基准频率。载波
频率、数据脉冲频率和CA(粗捕获)码依次由此频率生成(见图4-
10)。由于所有的GPS卫星均以1575.42MHz发送信号,因而采用了一种
称为CDMA(码分多址)的多路传输 [4] 处理。
图4-10 GPS卫星详细框图
CA码在多路传输和调制中扮演了重要角色。它是一个不断重复的
1023比特序列,被称为伪随机噪声(PRN)码。每颗卫星的PRN码都是唯
一的,并用作其辨识信号。CA码是通过反馈移位寄存器生成的 [5] 。
发生器带有一个频率为1.023MHz、周期为1023码片 [6] (相当于
1ms)。CA码是黄金码(Gold Code) [7] ,具有优良的校正特性。这对于后面位置计算中的导航处理有着重要影响。
[1] Lemme H.,《在一个芯片上实现快速的扩频调制》,Elektronik,1996年,H.15,第38至
45页。
[2] http:www.maxim-ic.comappnotes.cfmappnote_number1890
[3] Parkinson B.,Spilker J.,《全球定位系统》,第1卷,AIAA-Inc.
[4] 一种通过对每个用户使用不同的伪随机码序列将无线电信道划分为多通道的形式。由于调
制的编码信号具有比需通信的数据高得多的带宽,因此CDMA是一种“扩频”信号传输。
[5] 一种移位寄存器,输入比特是其此前状态的线性函数。
[6] 伪随机数列中的位的变换时间。
[7] 黄金码是指一种二进制序列,可由两个长度同为n的m序列得到。一组黄金码可通过改变这
两个m序列的相移来生成。黄金码的编码具有三值互相关函数的特点。4.4 控制部分
GPS卫星控制部分(操作控制系统,OCS)由位于科罗拉多州的主控
站、5个监控站(每个站均配备原子钟并分布在全球赤道附近)和3个向
卫星发送信息的地面控制站组成。
控制部分最重要的任务有:
●观测卫星运动并计算轨道数据(星历);
●监视卫星时钟并预测其运行情况;
●对星上时间进行同步;
●转发收自卫星的精确轨道数据;
●转发所有卫星的近似轨道数据(年历);
●转发其他信息,其中包括卫星健康状况、时钟误差等。
4.4.1 失效可能性与人为信号失真(SA)
控制部分还负责监视人为信号失真(选择可用性,SA),以降低供
民用使用时的系统定位精度。在2000年5月之前,美国国防部(GPS运营
者)出于政治和战略考虑故意降低系统精度。其中包括使用随机误差信
号调制部分卫星的时间信号,或者伪造星历。2000年5月初,SA系统失
效 [1] ,为此定位精度从100m左右猛然提高到13m(改善幅度达95%)
[2] ,见图4-11和图4-12。图4-11 2000年5月2日SA系统失效后,定位精度得以提高
图4-12 定位精度的提高表现为时间的函数
在2000年5月2日之后,只在必要时才激活地区性或全球性人为失真
(SA) [3] 。这一原则既保留了在特定重点地区降级或限制GPS使用的
可能性,又使在这些地区以外的系统精度不受限制。实际上还未曾听说
有重新激活SA系统的事例。美国国防部于2007年9月18日宣布,下一代GPS卫星(GPSⅢ)的卫
星导航信号将不再做人工失真处理 [4] 。这一代卫星也不再考虑信号失
真的技术可行性。由于美国政府未向GPSⅢ卫星加入信号失真功能,并
克制实行现有的SA措施,这将确保GPS对于民用用户的可靠性。
[1] http:www.ngs.noaa.govFGCSinfosans_SAdocsstatement.html
[2] http:pnt.govpublicsadiagram.shtml
[3] http:pnt.govpublicsasa.shtml
[4] http:www.defenselink.milreleasesrelease.aspx?
releaseid=11335,http:insidegnss.comnode2004.5 用户部分
GPS卫星发送的无线电信号到达地面上的接收机约需67ms。由于信
号以恒定速度(光速C)行进,其行程时间可确定卫星与用户之间的准
确距离。但光速是媒介的函数,后文对此将详加探讨。
接收机会收到4个不同的信号,这些信号来自4颗卫星,每个信号都
具有相同的结构。使接收机生成的信号与收自卫星的信号同步,将测得
的4颗卫星的信号时间偏移Δt作为时标(见图4-13)。然后将测得的所
有4颗卫星信号的时间偏移Δt用来确定精确的信号行程时间。这些时间
偏移乘以光速得到的距离称为伪距。
图4-13 测量信号行程时间
为确定用户的位置,需要与4颗卫星进行无线电通信。与这些卫星
之间的距离通过信号的行程时间确定。然后接收机根据伪距和这4颗卫
星的已知位置计算出用户的经度λ、纬度φ、高程h和时间t。如果换成
数学语言,就是通过这4颗卫星的距离和已知位置确定4个未知变量φ、λ、h和t,但这需要相当复杂的迭代,后文将详述这一过程。
上文提到,所有的GPS卫星以相同的频率发送信号,但使用不同的
CA码。通过相关性来进行卫星辨识和信号恢复。由于接收机能够识别
所有目前使用的CA码,通过将所有已知编码与所有接收到的卫星信号
进行系统的移位和比较,最终会找到完全匹配者(也就是说,相关因子
CF为1),并得到相关点(见图4-14)。相关点用于测量实际的信号行程时间以及辨识卫星。
图4-14 30位校准处理的图示说明
这里用CF(相关因子)来表示相关质量。CF的范围在±1之间,仅
当信号完全匹配(位顺序和相位)时为+1。
式中:mB――所有匹配的位的数量;
uB――所有不匹配的位的数量;
N――观测到的位的数量。
由于多普勒效应(卫星和接收机处于相对运动状态)的影响,发送
的信号在接收点的频移可能会达到±5000Hz。因此,信号行程时间的确
定和数据恢复不仅要与所有可能相移的所有编码相关,还要辨识正确的
相位载波频率。此外,本地基准频率可能也有偏差,这就加大了需要搜
索的频率宽度。本地振荡器1ppm的频率误差相当于1.575kHz的多普勒频
移。图4-15表示多普勒频移在±6kHz范围内时的本地振荡器偏差情况。
通过将所有编码(见图4-14)和载波频率与收到的卫星信号进行系统的移位和比较,就会找到一个完全吻合的点(即相关因子为1)(见图4-
15)。
收到的GPS信号功率谱密度约比热噪声或背景噪声的功率谱密度低
16dB(见图4-6)。对收到的GPS信号进行解调和解扩导致的系统增益GG
为:
解扩后,可用信号的功率密度要高于热噪声或背景信号噪声(图4-
16)。
通过增加相关时间(停留时间)可提高GPS接收机的灵敏度。相关
器在编码-频率域的指定点停留的时间越长,在天线位置所需的GPS信号
强度就越低。如果相关时间以系数k增长,则信号与热背景噪声之差会
提高GR :
GR =log10 (k)
图4-15 在编码和载波频率域内搜索最大相关点图4-16 相关信号和热信号噪声的谱功率密度
如果停留时间加倍,则信号与热背景噪声(接收机灵敏度)之差会
增加3dB。在实际使用中,将相关时间延至20ms并非难事。如果发送数
据的值已知,可以将该时间进一步延长。4.6 GPS导航电文
4.6.1 引言
GPS导航电文 [1] 是以50bits发送的连续数据流。每颗卫星都向地
球转发以下信息:
●系统时间和时钟修正值;
●卫星自身的高精度轨道数据(星历);
●所有其他卫星的近似轨道数据(年历);
●系统健康状况等。
导航电文对于计算卫星的当前位置以及确定信号行程时间是必不可
少的。
数据流被调制成各卫星的HF载波。数据按照称为帧或页的逻辑分组
单元发送。各帧的长度为1500bits,发送需要花费30s。一帧又被分为5
个子帧。各子帧的长度为300bits,发送需要花费6s。发送一个完整的
年历需要25个不同的帧。因此整个年历的发送时间为12.5min。除非配
有GPS增强器(参见第7章),否则GPS接收机必须收集到至少一个完整
的年历才能计算初始位置。
[1] 《GPS标准定位服务信号规范》,第2版,1995年6月2日。4.6.2 导航电文的结构
一帧的长度为1500bits,发送需要花费30s。这1500bits的信息被
分为5个子帧,每个子帧300bits(发送需花费6s)。每个子帧由10个字
(word)组成,每个字含30bits。子帧以一个遥测字(TLM)和一个转
换字(HOW)开头。一个完整的导航电文由25帧(页)组成。图4-17给
出了导航电文结构的图示。
图4-17 整个导航电文的结构4.6.3 子帧包含的信息
每一帧被分为5个子帧,每个子帧用于传送不同的信息。
●子帧1包含了发送信号的卫星的时间值,其中包括用于修正信号
传输延迟和星载时钟时间的参数,以及卫星健康状况信息和卫星位置精
度的估算值。子帧1还用于提供传送10bits GPS星期数(10bits可表示
从0至1023的数值)。GPS时始于1980年1月6日星期日0时0分0秒。每经
过1024个星期后,星期数重新从0开始。该事件称为“星期归零”。
●子帧2和3包含了发送信号的卫星的星历数据。这些数据提供了非
常精确的卫星轨道信息。
●子帧4包含了编号为25~32的卫星的年历数据(注意:每个子帧
只能用于发送一颗卫星的数据)、GPS时与协调世界时之间的差异
(即:闰秒或UTC偏差)以及与电离层导致的测量误差有关的信息。
●子帧5包含了编号为1~24的卫星的星历数据(注意:每个子帧只
能用于发送一颗卫星的数据)。所有的25页信息与编号为1~24的卫星
的健康状况信息一同发送。4.6.4 遥测字(TLM)与转换字(HOW)
每个单帧的首字是遥测字(TLM),它包含了一个8bits长的前置序
列(10001011)用于同步,接下来是为授权用户保留的16bits。与所有
的字一样,遥测字的最后6bits为奇偶校验位。
转换字(HOW)紧跟在每个子帧的遥测字后面。转换字长度为
17bits(17bits可表示从0至131071的数值),其中包含了下一子帧的
起始时间,以星期时(TOW)发送。星期时从GPS星期的起点数值0开始
(过渡期为星期六23时59分59秒至星期日0时0分0秒),并且该数值每
6s加1,由于每周有604800s,计数在归零之前从0累加至100799。每隔
6s将一个标志加入到数据流中与转换字一同发送,以便与P码同步。第
20~第22bit用于转换字,以标识刚发送完的子帧。4.6.5 25页的细分
完整的导航电文需要25页,发送至少需要12.5min。一页或一帧分
为5个子帧。所有25页的子帧1~3的信息内容均相同。这意味着接收机
每30s就能获得发送卫星的完整时钟值和星历数据。
子帧4与子帧5之间的差异仅在于发送信息的组织方式。
●对于子帧4,第2、3、4、5、7、8、9和10页转发编号为25~32的
卫星的年历数据。在所有情况下,每页只用来传送一颗卫星的年历数
据。第18页用来传送对电离层闪烁的修正测量值,以及协调世界时与
GPS时之间的差异。第25页包含了所有32颗卫星的配置信息(即分区关
系)以及编号为25~32的卫星的健康状况。
●对于子帧5,第1至第24页转发编号为1~24的卫星的年历数据。
在所有情况下,每页只用来传送一颗卫星的年历数据。第25页用来传输
编号为1~24的卫星的健康状况信息以及初始年历时间。4.6.6 星历与年历数据比较
借助星历和年历数据,就可以通过给定的时间点来确定指定卫星的
卫星轨道和相关坐标。发送的星历和年历数据差别在于数字的精度。表
4-2对这两组数字进行了比较。
卫星的轨道属椭圆形。图4-18对表4-2中使用的术语给出了图示。
轨道长半轴:a
轨道短半轴:b
椭圆轨道偏心率:e=4.7 GPS现代化
4.7.1 新调制方法,BOC和MBOC
图4-18 星历术语
4.7.1.1 BPSK(1)―调制
为使所有的卫星都能在相同的频率上传输,GPS信号采用特殊的编
码方式。民用标准定位系统(SPS)信号采用由1023个0和1组成的伪随
机噪声码(PRN)编码,称为CA码。该码的周期为1ms,码片速率为
1.023Mbits。它被连续重复发送,由于其唯一的结构使得接收机能够
辨识出哪颗卫星是信号的来源。
数据信号的扩频(或调制)通过异或操作(EXOR)来完成(见图4-
19),因而被称为二进制相移键控(BPSK(1))。基准频率信号由4个
原子钟之中的一个生成,所有的卫星信号都由此衍生。基准频率随后通
过CA码按1×1.023Mbits扩频或调制。图4-19 进行BPSK调制时,导航数据信号首先通过编码进行扩频
BPSK(1)信号的谱功率密度(PSD),如图4-20所示。
图4-20 BPSK(1)信号的谱功率密度(信号强度按每信号1W规范化)4.7.1.2 BOC―调制简介
将来GPS和欧洲GALILEO系统的基本调制都将采用称为二进制偏移编
码调制(BOC)的新调制方法。通过BOC对BPSK信号做进一步调制 [1] 。
调制频率通常为基频频率1.023MHz的倍数。该调制具有可通过特定方式
进行通信的特性。例如,BOC(10,5)表示调制频率是本频或基频频率
的10倍(10×1.023MHz),CA码码片速率是基频的5倍
(5×1.023Mbits)(见图4-21)。
图4-21 BOC(10,5)调制器框图
采用BOC可以使信号在带宽内更好地分布,并且反向信号反射(多
径效应)对导航信号接收的影响也较BPSK有所降低。BPSK(1)和
BOC(1,1)同时使用时相互间影响甚微,这是因为它们的最大功率谱
密度是分开的(见图4-22)。图4-22 采用BPSK(1)和BOC(1,1)时,信号最大值是分开的(信号强度按每信号1W规范
化)
[1] 《导航学会》杂志,2002年,第48卷,第4期,第227~第246页,作者:John W.Betz4.7.1.3 MBOC调制(多路BOC,MBOC(6,1,111))
2007年7月26日,美国和欧盟达成协议,GPS和GALILEO将采用相同
的调制方法。这种被称为MBOC(6,1,111)的新调制方式将用于新一
代GPS的L1C(L1民用)信号和GALILEO的L1OS(L1开放服务,有时也称
为E1)信号。MBOC调制是对BOC调制的扩展,组合了两个BOC调制器并以
不同的权重对其信号进行叠加(见图4-23)。
MBOC(6,1,111)= ・BOC(1,1)+ ・BOC(6,1)
图4-23 用于L1C和L1OS的MBOC(6,1,111)调制器
通过组合两个BOC的信号,可在较高的频率获得更好的性能(见图
4-24)。由此改善了跟踪性能,并使接收机对噪声、干扰和多径效应的
敏感性降低。为能充分利用这些特性,接收机带宽必须达到约
20MHz(BPSK(1)约为2MHz)。图4-24 MBOC(6,1,111)与BPSK(1)的谱功率密度比较(P=1W每信号)4.7.2 GPS现代化
自1978年GPS投入使用以来,所有的卫星都向地面发送以下三种信
号:
●在L1频率(1575.42MHz)上:一路民用信号(使用CA信号、BPSK(1)调制的SPS服务),一路军用信号(使用P(Y)信号、BPSK(10)调制的PPS服务);
●在L2频率(1227.60MHz)上:第二路军用P(Y)信号。
美国国防部计划逐步改进GPS信号结构(见图4-26)。对于民用而
言,引入第二个和第三个频率是非常重要的,如果在定位时可以使用更
多的频率,就能补偿甚至消除电离层对信号行程时间的影响。由于在电
离层中的传输速度C [1] 取决于频率,因此实现这种补偿是可能的。除
了两路新信号,GPS现代化还增强了民用用户的信号强度并提高了军事
应用能力。
GPS运营者为GPS现代化制定的时间表 [2] 如下:
到2009年底,将8颗ⅡR-M型(Block2,补充型和军用型)新卫星送
入轨道。ⅡR-M卫星发送的额外信号有:
●一路新的民用信号,频率为1227.60MHz,即L2C信号;
●新增的军用信号,频率为1575.42MHz和1227.60MHz:即M信号。
这些M信号采用BOC(10,5)调制。
2009年底之后,将24颗GPS ⅡF型(Block2,改进型)卫星送入轨
道(见图4-25,左图 [3] )。这些卫星最重要的特点是:
ⅡF卫星以1176.45MHz(L5频率)的频率发送新的民用信号。该信
号要比以前的民用信号更稳定,可用于要求严格的航空应用。
2013年之后计划采用新一代卫星。新系列定名为GPSⅢ(Block3)
(见图4-25,右图 [4] )。这些卫星最重要的特点是:
●部署聚能波束天线以提高M信号(相当于M+)的信号强度;●对民用L1频率的CA信号结构进行改进,这种新信号将定名为L1
C;
●信号传输的完整性;
●搜索和救援能力;
●未内置实施人为降低性能的功能(选择可用性,即SA)。
图4-25 GPS ⅡF卫星(左图)和GPS Ⅲ卫星(右图)
GPS地面站也将更新。整个系统改造将于2021年完成并投入运营。
届时用户可以使用新信号。图4-26 经过现代化可用的GPS频率将增加
[1] 约为300000000ms。
[2] Ray Clore,《GPS星座更新》,TimeNav.07导航系统现状,日内瓦,2007年。
[3] http:www.boeing.comdefensespacespacegpsindex.html
[4] http:www.aero.orgpublicationscrosslinksummer200207.html第5章 GLONASS、GALILEO和北斗
系统 您是否想了解……
○俄罗斯导航系统GLONASS的工作原理
○为何要建立GLONASS
○欧洲将要启动哪个系统
○为何GALILEO将提供不同的服务
○SAR对海员意味着什么
○新式调制处理BOC的工作原理
○中国计划的此类系统的情况
如果是这样,你应该阅读本章!
5.1 引言
2005年12月28日,首颗GALILEO卫星被送入轨道。到2014年,可能
会出现3个独立的GNSS。GPS、GLONASS和GALILEO。GPS近期将进行改进
因而会更加可靠(参见4.7节)。本章综述了现有的GLONASS、未来欧盟
的GALILEO以及中国计划的GNSS:北斗系统。5.2 GLONASS:俄罗斯系统
GLONASS是目前由俄罗斯国防部运营的GNSS的缩写。GLONASS这一名
称取自Global Navigation Satellite System。该计划最初由苏联发
起,目前由俄罗斯管理。先期的3颗试验卫星于1982年10月12日送入轨
道。
GLONASS最重要的信息有:
●计划总共24颗卫星(21颗标准卫星+3颗备用卫星)。但这个数字
从未达到。2008年初共有14颗卫星在轨运行(见表5-1 [1] )。单个卫
星只有相对较短的3~4年寿命,因而影响了系统的完整性。●3个轨道面(见图5-1 [2] )与赤道的夹角为64.8°(这是所有
GNSS中角度最大的,能够在极区更好地接收信号)。图5-1 GLONASS的三个轨道面
●轨道高度为19100km,轨道周期为11h15.8min。
●每颗GLONASS卫星以两个频率发送两种编码(CA码和P码)。每
颗卫星发送同样的编码,但采用1602MHz(L1波段)和1246MHz(L2波
段)附近的不同频率。这些频率可通过以下公式确定(k为所考虑的卫
星频道):
□在L1波段的频率:f1 =1602MHz+k×(916)MHz
□在L2波段的频率:f2 =1246MHz+k×(716)MHz
5.2.1 GLONASS的建成
完全部署GLONASS需要24颗工作卫星。俄罗斯计划让该系统全面运
营。用质子号(Proton-K DM-2)定期将3颗GLONASS-M卫星(Uragan卫
星)发射入轨(见图5-2 [3] )。M系列的寿命为7~8年,可发送2路民
用信号。
2009年之后将发射GLONASS-K系列卫星。这些卫星的寿命有望达到
10~12年,可发送三路民用信号。所需的24颗卫星到20092010年应全部在轨运行(见图5-3 [4] )。
图5-2 GLONASS-M卫星与质子号(Proton-K-DM2)火箭发射
图5-3 GLONASS发展计划GLONASS的测量定位精度将逐步接近GPS的水平(见图5-4 [5] )。
随着GLONASS的现代化和部署,该系统预计将会有以下变化:
●控制部分更新。
图5-4 待发展计划完成后,测量定位精度应相当于GPS的水平
●时间基准原理现代化。
●星历和卫星时间的测量和发送更加精确。
●卫星时钟的稳定性提高。
●使用的参考椭球(大地参考框架PZ-90)将接近国际地球参考框
架(ITRF)。
●GLONASS-K卫星将引入第三路民用信号(L3)。
●GLONASS-K将加入搜索和营救功能。
●考虑以后在L1频段发送CDMA信号。
[1] http:www.glonass-ianc.rsa.ruplshtmldbf?p=202:20:2776707736388438778::NO
[2] Sergey Revnivykh,第46届CGSIC会议,美国得克萨斯州沃斯堡市,2006年9月26日。
[3] http:www.nasa.govmultimediaimagegalleryindex.html
[4] Sergey Revnivykh,慕尼黑卫星导航峰会,2006年2月21~23日。
[5] Sergey V.Averin,欧盟导航会议GNSS-20065.3 GALILEO
5.3.1 概述
GALILEO是欧盟(EU)与欧洲空间局(ESA)紧密合作研发的欧洲
GNSS。GALILEO由30颗卫星组成,这些卫星处在3个圆形轨道上,距地面
的高度为23222km [1] 。一个遍布全球的地面站网络对卫星提供支持。
从欧盟的角度看,引入GALILEO的主要原因有:
●摆脱对美国的依赖。
●拥有一个精确的导航系统。开放服务(OS)提供的精度有望达到
4~15m。关键安全服务的精度应为4~6m。多径接收敏感度也将下降。
通过采用BOC和MBOC调制实现这一改进。GPS在进行现代化时也将采用
BOC和MBOC调制。
●拥有一个纯民用的导航系统。GALILEO按民用标准设计和实施。
GALI-LEO将为一些服务提供工作保障。
●提供更多的服务。GALILEO将提供5种不同的功能。
●提供搜索与救援功能。其他组织已经提供了搜索和救援(SAR)
功能。GALILEO在此方面的创新是对警报进行应答。
●通过完整性电文提升安全性。GALILEO采用完整性电文,因而更
加可靠。这样就可以立刻通知用户已出现差错,由此保证了可用性。对
于开放服务,既没有可用性保障,也没有完整性电文。这些服务只能通过EGNOS [2] 获得。
●创造就业机会。
●获得GNSS的技术要诀。欧盟计划通过GALILEO来获得专业知识,同时为国内产业提供可持续增强的竞争力。例如,GALILEO使用的原子
钟将在欧洲制造(见图5-5 [3] )。
图5-5 铷与氢微波激射器原子钟
改善卫星信号的全球覆盖率。GALILEO将为高纬度城市提供比GPS更
好的接收性能,这是由于GALILEO卫星的轨道与赤道的夹角为56°并且
高度为23616km。此外,现代的GNSS接收机能够同时处理GPS和GALILEO
信号。这就使可看到并能收到信号的卫星数量倍增,提高了覆盖率和精
度等级。
[1] http:www.esa.intesaNASEMJQSXEM4E_galileo_0.html
[2] 欧洲地球同步导航重叠服务。
[3] http:www.esa.intesaNASEM51URMD6E_galileo_0.html5.3.2 计划中的GALILEO服务
对于某些关键应用,GALILEO将提供有关系统完整性的信息以确保
定位精度。完整性可理解为所提供信息和数据的可靠性。当系统精度低
于设定的最小值时,用户可迅速(不超过6s)收到报警。GALILEO的运
营者认为,这些警告的及时性有时足以应付某些关键应用(如飞机着
陆)。各种服务都对功能、精度、可用性、完整性和其他参数提出了不
同的要求。
5.3.2.1 开放服务,OS
开放服务(OS)针对的是预期的大众市场应用。它能为定位和授时
提供免费信号,对精度要求不高的应用可使用相对廉价的单频率接收
机。由于GALILEO和GPS(L1)对这些应用使用了相同的发射频率,导航
接收机将能够结合使用这两种信号。由于可收到的卫星信号数量增加,即使在不利的条件下接收性能也会有所改善(如在城市环境里)。开放
服务不提供系统完整性信息,GALILEO运营者既不保障可用性,也不为
此承担责任。5.3.2.2 商业服务,CS
商业服务(CS)用于比开放服务性能要求更高的市场应用。商业服
务在使用收费的基础上提供各种为客户带来效益的服务。这些应用中的
典型例子包括:提供高速数据发送服务、可用性保障、与精确授时有关
的服务,以及用于提高位置精度的本地修正信号。5.3.2.3 人身安全服务,SoL
人身安全服务(SoL)主要用于交通方面,对于这一类应用,当导
航系统出现故障时,如果没有及时预警可能会危及生命。它与开放服务
的主要区别在于,人身安全服务可在全球范围为关键应用(如航海、航
空和铁路交通)提供高等级的信息完整性。只有经过认证的双频接收机
才能使用该服务。为实现必要的信号保护,人身安全服务在部署时使用
航空信道(L1和E5)。5.3.2.4 公共管制服务,PRS
GALILEO虽是民用系统,但也能为政府(包括军队)提供稳定和访
问受保护的服务。公共管制服务(PRS)可供警察、消防和边境巡逻队
之类的客户使用。对该类服务的访问受到民事部门的限制和控制。公共
管制服务必须能够在各种条件下连续地使用,尤其是在其他服务可能中
断的关键情况下。公共管制服务与其他服务独立,并具有高等级的信号
稳定特性。公共管制服务还能防范电磁干扰和电磁欺诈。5.3.2.5 搜索和救援,SAR
搜索和救援服务将用于人道主义搜索和救援工作。应急发射机和卫
星能定位飞行、陆上和海洋紧急事件中的个人、船只和车辆。20世纪70
年代末,美国、加拿大、苏联和法国开发了一个卫星系统用来定位被激
活的遇险信标。该系统被称为SARSAT(搜救卫星救助跟踪系统,Search
And Rescue Satellite-Aided Track-ing),俄罗斯将该系统称
为“COSPAS”。COSPAS-SARSAT系统采用6颗LEO(低地轨道)卫星和5颗
GEO(地球同步轨道)卫星。GALILEO搜索和救援服务计划在以下方面对
现有的COSPAS-SARSAT [1] 系统进行扩展和改进:
●几乎能即时接收来自全球的紧急呼叫(目前平均有1h的延迟)。
●准确测定遇险信标的位置(精度为数米而不是目前的5km)。
●通过使用更多的卫星提高了空间部分的效率,能克服不利条件下
的局部盲区(30颗中轨道GALILEO卫星对现有COSPAS-SARSAT系统的低地
轨道卫星和地球同步卫星是一个补充)。
图5-6 与COSPAS-SARSAT不同,GALILEO的搜索和救援服务还提供对遇险信标的应答
GALILEO将加入一种新的搜索和救援功能,可启动对遇险信标应答
(由搜索和救援操作人员回复应急发射机电台)。这将简化救援措施并减少误报的数量。GALILEO的搜索和救援服务定位为与COSPAS-SARSAT协
同工作,由IMO(国际海事组织)和ICAO(国际民航组织)负责管理该
服务的特性和功能。
[1] http:www.cospas-sarsat.orgStatusspaceSegmentStatus.htm5.3.3 精度
根据服务的不同,GALILEO提供不同等级的精度 [1] 。如果使用双
频接收机,通过补偿电离层环境造成的信号行程时间误差可改善精度。
通过使用当地测量数据(如DGPS),可将精度提高至厘米级。表5-2给
出了各种测量服务期望值为95%时的精度。
[1] http:www.gsa.europa.eugocommunications-centerpublications5.3.4 GALILEO技术
GALILEO的空间部分由30颗卫星组成(其中3颗为备用卫星)。这些
卫星被送入高度为23616km的圆形轨道以提供全球覆盖。卫星(每颗重
680kg、尺寸为2.7m×1.2m×1.1m)均布在3个轨道上,与赤道的夹角为
56°(见图5-7),轨道周期为14h5min。
GALILEO卫星预计质量为700kg,尺寸为2.7m×1.2m×1.1m,设计工
作寿命为15年。大面积太阳能电池板提供所需的1500W电力。为使导航
数据保持最新,卫星将每隔100min定期通过无线电与系统的地面部分联
系。
系统的地面部分由2个控制中心以及一个用于各种任务的全球台站
网络组成。其中包括对信号完整性以及大范围预测搜索和救援服务协调
的监视。
图5-7 GALILEO卫星的星座图(供图:ESA-J.Huart)图5-8 GALILEO卫星(供图:ESA-J.Huart)
计划建立全球范围的控制中心以便进行导航和卫星控制。地面部分
的核心由德国和意大利的两个GALILEO控制中心组成 [1] 。主控制中心
为位于Oberpfaffen-hofen的德国航空航天(DLR)中心。计划由该中心
负责30颗卫星为期至少20年的正常运营的控制。第二个担负其正常运营
特定职责的综合控制中心位于意大利Fucino,它也是主控制中心一旦可
能发生任何故障时的一个备份。30颗卫星的定位控制工作由位于德国
Darmstadt的欧洲卫星控制中心(ESAESOC)和法国Toulouse的法国空
间研究中心(CNES)平分,分布在世界各地的约30个综合监测站
(IMS)将控制卫星信号的完整性。两个控制中心将对综合监测站的信
息进行评估,并在位置数据偏差过大时发出警报。
计划通过3枚阿里安5号火箭(每枚携带8颗卫星,见图5-9)、3枚
联盟火箭(每枚携带两颗GALILEO卫星)将这些卫星送入中地球轨道
(MEO)。图5-9 阿里安5号火箭将8颗GALILEO卫星送入太空(GALILEO-industries.net)
5.3.4.1 信号频率
根据服务的不同,使用的频率、调制模式和数据传输率也有所不同
(见表5-3和图5-10 [2] [3] )。主要的调制模式将为BPSK和BOC。作为
例外,E5a和E5b采用一种略加改进、称为AltBOC的BOC调制版本。图5-10 GALILEO服务的频率及保留带宽
此外,E5a、E5b、E6和L1还以导频信道发送。导频信道提供免费的
导航数据,其相位相对其他信号移相90°,这样就缩短了接收机的捕获
时间。在L1与E6之间为搜索和救援一下行链路频率。
[1] http:www.esa.intesaCPSEMT498A9HE_Austria_0.html
[2] http:www.esa.intesaNASEM86CSMD6E_galileo_0.html
[3] 《MBOC调制》,G.W.Hein et al.,《InsideGNSS》,2007年910月,第43页。5.3.4.2 时间计划
2004年6月26日,经过多年艰难的谈判,美国和欧盟在都柏林签署
了一项协议。该协议旨在确保GALILEO与其美国伙伴GPS之间的无缝协作
(互操作性)和兼容性。
图5-11 计划的GALILEO频率
2004年12月10日,根据欧洲委员会的建议,欧洲理事会确认了系统
的技术特性以明确需要提供的服务。2007年7月26日,就L1波段公共民
用信号的开放达成一致。根据欧洲委员会的要求,GPS L1C和GALILEO
L1F信号将采用MBOC(6,1,111)调制,GALILEO将于20132014年投
入运营。
整个系统的建设将分为4个阶段:
●项目定义:定义阶段的目标是制定系统的基本参数和规格。整个
项目的这一部分已于2003年完成。
●在轨开发和试验:2005年12月28日,从俄罗斯哈萨克斯坦拜科努
尔航天发射场将首颗试验卫星GIOVE-A送入轨道(见图5-12)。GIOVE是
GALI-LEO In-Orbit Validation Element(伽利略在轨验证元素)的缩
写,也是木星的意大利语。第二颗试验卫星GIOVE-B于2008年4月27日成功发射入轨 [1] ,第三颗GIOVE-A2也在这一年发射。欧盟通过这些试验
卫星冻结了GALILEO的工作频带并确定了测试阶段卫星的轨道。这些先
驱卫星还用来在太空严酷的环境下试验原子钟之类的重要技术。GIOVE-
A载有两台铷原子钟(稳定性为每天误差约10ns),GIOVE-B载有两台被
动氢微波激射器原子钟(稳定性为每天误差不超过1ns)。
●实施和启动整个系统:如果前两个阶段收效良好,随后将为全面
运营而着手构建系统。剩余的卫星将于20132014年出厂并送入轨道。
图5-12 GIOVE-A卫星及2005年12月28日发射时的情形(ESA供图)
●运营:一旦所有的卫星都进入轨道,系统就可以投入运营。在建
设阶段后期,轨道上应有27颗工作卫星、3颗备用卫星。地面站以及本
地和区域服务站也应建成。
[1] http:www.giove.esa.int5.3.5 GNSS最重要的三个特性
表5-4列出了三个现有(或计划中的)GNSS最重要的特性。5.4 中国的北斗1代和北斗2代系统
5.4.1 目前的系统:北斗1代
2000~2007年间,中国发射了4颗地球同步卫星用于区域性北斗系
统。这些卫星(北斗-1A至北斗-1D)在中国上空发送信号。在卫星与导
航接收机之间通过交互方式定位。信号的发送和接受采用迭代的方式:
●导航接收机向4颗地球同步卫星发送信号。
●所有4颗卫星都收到该信号。
●所有4颗卫星将接收到信号的准确时间发送给地面站。
●地面站计算接收机的经度和纬度并确定其高程。
●地面站将位置信息发送给地球同步卫星。
●地球同步卫星将位置信息发送给导航接收机。5.4.2 未来的系统:北斗2代
中国计划中的全球卫星导航系统目前称为北斗2代,英文缩写为
CNSS(Compass Navigation Satellite System,即北斗导航卫星系
统)。计划中的系统由5颗地球同步卫星和30颗中轨道卫星组成 [1] 。
地球同步卫星按类似SBAS的方式对整个系统进行扩展。北斗系统将提供
两种导航服务:
●开放服务:位置精度为10m,速度精度为0.2ms,时间精度为
50ns。
●授权用户服务:该服务将比开放服务更加可靠。
中轨道卫星将分布在6个轨道上。这些卫星中的首颗已于2007年4月
发射入轨(见图5-13)。计划2020年前后,建成覆盖全球的北斗卫星导
航系统。图5-13 首颗北斗轨道卫星于2007年4月由长征3号甲火箭发射升空
[1] http:www.china.org.cnenglishMATERIAL188713.htm第6章 计算位置 如果你想了解……
○如何确定坐标和时间
○什么是伪距
○为何GNSS接收机在计算开始前必须进行一次位置估算
○如何使用4个未知变量求解非线性方程
○GPS运营者声称的精度如何
如果是这样,你应该阅读本章!
6.1 引言
GNSS将复杂的卫星和无线电技术相结合,为导航接收机提供无线电
信号,这些信号中包含了发送时间和发送信号的卫星的标识。本章将介
绍通过这些信号计算位置所需的数学运算。6.2 计算位置
6.2.1 测量信号行程时间的原理(伪距估算)
为确定位置,GNSS接收机必须接收来自4颗独立卫星的时间信号
(卫星1~卫星4),以便计算信号行程时间Δt1 ~Δt4 (见图6-
1)。
计算受到地心原点三维笛卡儿坐标系的影响(见图6-2)。用户与
这4颗卫星中的每一颗的距离R1 ,R2 ,R3 和R4 可通过这4颗卫星与用
户之间的行程时间Δt1 ,Δt2 ,Δt3 和Δt4 来确定。如果已知这4颗
卫星的位置XSat ,YSat 和ZSat ,就可以计算出用户的坐标。
由于卫星上载有原子钟,因此可以非常准确地知道卫星发送信号的
时间。所有的卫星时钟都相互校准并与UTC(协调世界时)同步,而接
收机时钟与协调世界时并不同步,较之或慢或快Δt0 。如果用户时钟
较快,Δt0 的符号为正。时间误差Δt0 造成信号行程时间测量和距离
R不准确。因此,测得的不准确距离被称为伪距PSK [1] 。图6-1 必须接收来自4颗卫星的信号
图6-2 三维坐标系
Δtmeasured =Δt+Δt0 (6-1)PSR=Δtmeasured ・c=(Δt+Δt0 )・c (6-2)
PSR=R+Δt0 ・c (6-3)
式中:R――卫星与用户之间的真实距离;
c――光速;
Δt――从卫星到用户的信号行程时间;
Δt0 ――卫星时钟与用户时钟之差;
PSR――伪距。
在笛卡儿坐标系中,卫星与用户之间的距离R计算如下:
将式(4)代入式(3):
为确定4个未知变量(Δt0 ,XUser ,YUser 和ZUser ),需要4个独
立方程。
以下等式对这4颗卫星成立(i=1~4):
[1] Manfred Bauer:《测量与卫星定位》,Wichman出版社,海德堡,1997年,ISBN 3-87907-
309-06.2.2 方程的线性化
式(6-6)中的4个方程构成了非线性方程组。为求解该方程组,根
据泰勒模型先将根函数线性化,在这里只展开第一级(见图6-3)。
图6-3 泰勒级数转换
通常表示为(令Δx=x-x0 ):f(x)=f(x0 )+ (x0 )
・Δx+ (x0 )2 ・Δx+ (x0 )3 ・Δx+…
可简化为(只展开第一级):f(x)=f(x0 )+f′(x0 )
・Δx (6-7)
为将式(6-6)的4个方程线性化,必须引入一个接近X的任意估算
值x0 。这意味着先使用估算位置XTotal ,YTotal 和ZTotal ,而不是直接
计算XUser ,YUser 和ZUser (见图6-4)。图6-4 估算位置
该估算位置含有由未知变量Δx,Δy和Δz产生的误差。
XUser =XTotal +Δx
YUser =YTotal +Δy
ZUser =ZTotal +Δz
(6-8)
可通过类似于方程(6-4)的方式计算卫星与估算位置之间的距离
RTotal :
将方程(6-9)与方程(6-6)和方程(6-7)组合可得:
再经过偏微分,可得到以下结果:6.2.3 解方程
对方程(6-11)(i=1~4)进行代换后,可根据线性代数法则解出
这4个变量(Δx,Δy,Δz和Δt0 ):
根据方程(6-8),用Δx,Δy和Δz的解重新计算估算位置XTotal
,YTotal 和ZTotal 。
XTotal_New =XTotal_Old +Δx
YTotal_New =YTotal_Old +Δy
ZTotal_New =ZTotal_Old +Δz
(6-14)
此时可通过标准迭代处理将估算值XTotal_New ,YTotal_New 和ZTotal_New 代入方程组(6-13),直至误差分量Δx,Δy和Δz小于所要
求的误差(即0.1m)。根据初始估算的不同,要使误差分量小于1cm通
常需要进行3~5次迭代计算。6.2.4 小结
为确定位置,用户(或用户的接收机软件)或者使用最新的测量
值,或者估算一个新位置并通过反复迭代直至计算出的误差分量
(Δx,Δy,Δz)降至零。这可以表示为:
XUser =XTotal_New
YUser =YTotal_New
ZUser =ZTotal_New
(6-15)
Δt0 的计算值对应于接收机时间误差,可用来调整接收机时钟。6.3 确定行程时间的具体方法
6.3.1 时间系统
在确定从卫星到接收机的信号行程时间时,分清不同的时间系统至
关重要(参见3.5节)。
●UTC,协调世界时(参见3.5.2节)。
●GPS时,用于GPS系统的时间系统。GPS时与协调世界时的差别在
于所有累计的秒数(2008年相差14s)以及低于1μs的误差。GPS时与协
调世界时之差以及该差值的当前特性通过导航电文(子帧4,第18页)
发送。
●卫星时,每颗卫星的星上时间。卫星时与GPS时的具体差值以及
该差值的当前特性通过导航电文(子帧1,第1至25页)发送。
●接收机时,GPS接收机的内部时间。该时间通常由内部的石英晶
体振荡器确定,有别于GPS时和或协调世界时。该差值T0在GPS接收机
开始工作时未知,但经过数次测量后可以降低。6.3.2 确定行程时间的具体方法
以下部分讨论了确定信号行程时间所需的方法。为了保留该方法的
全貌,对该过程的描述做了大量简化。行程时间用于计算自卫星至接收
机的距离(R)。图6-5表示了距离(R)与行程时间的线性相关性(图
上给出了最初的2μs)。
图6-5 根据信号行程时间Δt确定距离(R)(c=光速)
6.3.2.1 第1步:通过相关性确定信号到达时间
GPS接收机会接收到来自1颗或多颗卫星的信号。每个信号都具有相
关性。在此描述的相关处理是针对单个信号的,但所有的卫星信号都必
须进行同样处理。
由于接收机在接收信号时发射信号的卫星数量(x)是未知的,接
收机会生成各种PRN码(x=1~32)。将这些编码按时间平移,直至某个
PRN码与卫星信号x的时间和信号形式达到最大相关(图6-6:时间平移
为t2 时达到最大相关)。图6-6 搜索最大相关
所需的时间平移ΔtKo 和接收机时标(如毫秒间隔)确定了所观测
卫星信号的到达时间(时间以接收机时给出)。在图6-7中测得到达时
间的精确值为2h 25min35.7293s。
图6-7 确定卫星信号到达时间6.3.2.2 第2步:对数据和或导航电文进行重构
搜索并保持最大相关,即卫星信号与接收机生成的PRN序列连续同
步。将时移的PRN序列(CA码)与卫星信号关联,由此可重构导航电文
(见图6-8)。
图6-8 重构导航电文6.3.2.3 第3步:确定发送时间
导航电文的每个子帧(参见4.6节)以8bits的报文头开始。遥测字
(TLM)报文头的结构定义为10001011的模式,该比特序列每6s重复一
次。在导航电文带有17bits星期时(TOW)电文的首个子帧的转换字
(HOW)中,包含有该报文头的发送时间(以卫星时表示)。
图6-9 导航电文的遥测字(TLM)和转换字(HOW)
此时GPS接收机开始在导航电文中搜索10001011模式。由于该模式
也可能在导航电文的其他部分出现,因此还必须符合其他参数条件:
●两个逻辑0必须出现在假定的报文头之后第51比特和第52比特
(转换字的最后两个奇偶校验位设为0)。
●从假定的报文头之后第16比特开始的奇偶校验位(遥测字的奇偶
校验位)必须正确。
●假定的报文头之前的两比特必须为0(子帧结束位置的每个字最
后的奇偶校验位设为0)。
●从假定的报文头之后第22比特开始的遥测字电文(17bits)中给
出的时间必须大致正确。由于每6s反复提供时间信息,因此对接收机的
时间测量精度要求不必太高。
●下一个子帧的报文头必须正好在假定的报文头之后第300比特开
始。如果系统确认达到上述条件之一,则不必再比较所有的约束条件。
报文头第一比特的发送时间位于上一帧导航电文的遥测字中。该时
间以卫星时给出,但由于该信息包含在导航电文中,可将其转换为GPS
时。6.3.3 确定行程时间误差
如果报文头有效,则测量报文头第一位的到达时间(参见6.3.2.1
节)。该时间以接收机时给出。由于接收机时与GPS时并不一致,而是
相差Δt0 ,因此测得的行程时间不准确。图6-10给出了确定行程时间
误差的过程(比较图6-5)。这里使用了两种不同的时标:
●信号发送时间采用GPS时;
●信号到达时间采用接收机时。
图中还给出了接收机时与GPS时之差Δt。
t测量 =Δt+Δt0 =到达时间接收机时 -发送时间GPS时
式中:Δt――卫星到发射机真实信号行程时间;
t0 ――接收机时与GPS时之差。6.3.4 影响行程时间的其他因素
从卫星到接收机的信号行程时间不仅取决于距离,还受到其他一些
物理因素的影响。在文档“Navstar GPS空间部分导航用户接口 [1]”中给出了有关考虑多种参数进行修正的示例(见图6-11)。
图6-10 确定行程时间误差图6-11 确定修正的行程时间示例
[1] 《接口规范》,IS-GPS-200,版本D,IRN-200D-001,2006年3月7日,第92页。6.4 误差分析与精度因子
6.4.1 引言
到目前为止,尚未考虑计算中的误差量。在GNSS技术中,总误差可
能会由各种原因造成:
●卫星时钟:尽管每颗GPS卫星都配有4台高精度原子钟,但10ns的
时间误差足以产生相当于3m的定位误差。
●卫星轨道:一般来说,卫星位置的真实值只能做到1~5m的精
度。
●光速:信号以光速从卫星出发。它们在穿越电离层和对流层时会
减慢,因此不能将其视为常数。这种与标准光速的偏差会给计算位置带
来误差。
●信号行程时间误差测量:全球卫星导航系统接收机只能以有限的
精度确定输入的卫星信号时间。
●多径效应:由于接收到被反射的信号,误差量会进一步加大。
●卫星几何形态:如果用于测量的4颗参考卫星较为接近,确定位
置会更加困难。卫星几何形态对测量精度的影响被称为DOP(精度因
子,Dilution Of Precision的缩写)。
测量误差的成因有多种。表6-1给出了不同误差源所导致的水平位
置误差范围。
通过采取修正措施,DGPS(差分GPS,参见7.6节)可将误差源的数
量减少或降低。6.4.2 卫星几何形态对精度的影响,DOP值
6.4.2.1 引言
GPS导航的定位精度一方面取决于各个伪距测量,另一方面取决于
所用卫星的几何构型。该构型可用一个标量来表示,在导航领域中称为
DOP(精度因子)。
DOP值描述了对精度的削弱程度,因而它是星座与不精确度之间相
关性的因子或度量。如果DOP值较高(例如,所有可见的卫星彼此之间
比较接近),则预期的不精确度也会升高。
使用的其他DOP术语有:
●GDOP(Geometric-DOP,几何DOP):描述卫星几何形态对三维空
间和时间测量精度的影响。
●PDOP(Positional-DOP,位置DOP):描述卫星几何形态对三维
空间位置的影响。
●HDOP(Horizontal-DOP,水平DOP):描述卫星几何形态对平面
定位的影响(二维)。
●VDOP(Vertical-DOP,垂直DOP):描述卫星几何形态对高度
(一维)的影响。
●TDOP(Time-DOP,时间DOP):描述卫星几何形态对时间测量的
影响。
卫星几何形态对不精确度的影响如图6-12所示。当两颗卫星之间的
间距较大时(左图),定位误差(红色区域)较小。如果它们彼此较为
接近(右图),则误差区域较大。这一原理适用于需确定的位置存在不
确定性时,称为距离误差(R-E:黄色和蓝色区域),对两颗卫星同样
起作用。R(R1 和R2 )代表测得的从卫星到用户的距离(伪距)。图6-12 以距离R1 和R2 为半径作圆,交点处的夹角越平坦,DOP值越高6.4.2.2 图解DOP值成因
GPS在导航模式下的位置计算精度一方面取决于各个伪距测量,另
一方面取决于所用卫星的几何构型(以DOP值表示)。如果用来测量的4
颗卫星彼此较为接近时,位置精度会下降。测量精度与DOP值成正比。
这意味着如果DOP值加倍,位置误差也以两倍的因子增加。
一般来说,总位置误差可表示为其他误差的总和乘以DOP值。
(由其他因素造成的位置误差)・(DOP值)
可将DOP值视为由卫星和用户所在位置构成的四面体体积的倒数
(见图6-13)。随着四面体体积的增加,DOP值的量值(即不精确度)
下降。
图6-13 封闭的体积越大,DOP值越小6.4.2.3 DOP值的实际含义
在开阔的无障碍区域,卫星覆盖非常有利,DOP值很少超过3(见图
6-14)。
在山区、丛林和城区,DOP值在计划测量项目时起到重要作用。这
是由于卫星在很多阶段处于非常不利的几何星座构型,因此有必要根据
DOP值(如HDOP)计划测量项目,或者评估在数分钟内可能出现的各种
DOP值下可达到的精度。
借助由领先的GPS设备制造商提供的所有计划和评估工具,可将DOP
值可视化。图6-15给出了一个开阔区域、卫星可视性(阴影部分)无障
碍的HDOP值示例(最大HDOP<1.9)。图6-16给出了一个卫星可视性受
到严重阻碍区域的HDOP值示例,该位置的最大HDOP值经常超过20。自
180°至270°的区域受到一座高层建筑物的阻挡,自270°至180°可见
性受到山峰阻碍的影响。图6-14 DOP值与24h内经过开阔区域的卫星数量
图6-15 24h内的HDOP值,无遮挡阻碍区域的卫星可视性(最大HDOP<1.9)
由于受大范围遮挡,只偶尔有机会(如11:00~12:30之间,见图6-
16)出现最佳DOP值(<2)可供确定位置。在DOP值超过6(如9:00~
9:30之间)的期间应避免精确测量。
可根据当前卫星星座来估算DOP值(见图6-17和图6-18)。6.4.2.4 总误差
测量精度与DOP值成正比。这意味着当DOP值加倍,定位误差也会翻
番。
图6-16 24h内的HDOP值,受到较强的遮挡阻碍区域的卫星可视性(最大HDOP>20)
图6-17 卫星星座不利时的DOP值图6-18 卫星星座有利时的DOP值
一般可表示为:误差(1σ)=1×RMS值×DOP值
误差(2σ)=2×RMS值×DOP值
在表6-2中给出了1σ(1σ=68%)和2σ(2σ=95%)时的误差值。
这些数值在HDOP=1.3的中等卫星星座情况下有效。通过采用适当的修正
方法(例如:联合使用若干接收机(差分GPS,即DGPS,参见第7
章)),可减少或降低误差源数量(通常为1~2m,1σ值)。
通常精度要好于表中给出的数据。来自美国联邦航空局的长期测量
数据表明,在全部测量结果中95%的情况下,水平误差小于7.4m、垂直
误差小于9.0m。测量的时间周期通常为24h。
美国国防部称,其系统为标准民用应用提供的水平精度为13m,垂
直精度≤22m,时间精度为40ns。通过采用其他措施(如DGPS)、延长
测量时间和特殊测量技术(相位测量),可将位置精度提高到1cm以
内。6.4.2.5 计算DOP值
各个DOP值可根据卫星和GPS用户的位置来确定。
在图6-19中,Ri (i=1~4)为从卫星到用户的距离。
根据图6-19所示情况,可得到所谓的位置矩阵。
通过对位置矩阵进行变换([]T )、乘法(・)和转置([]-1 ),可计算出DOP矩阵D(通过将行向量变换为列向量 [1] ):图6-19 卫星和用户位置描述(笛卡儿坐标)
D=[[P]T ・[P]]-1
根据矩阵运算法则,16元的DOP矩阵表示如下:
然后通过矩阵D的矩阵元素来确定各个DOP值:部分DOP值可直接由其他DOP值导出,例如:
如果可见的卫星多于4颗,GPS接收机从中选择DOP值最佳的4颗卫星
来计算位置。
[1] http:www.scilab.orgcontribindex_contrib.php?page=download&
category=MANUALS,http:en.wikipedia.orgwikiTranspose第7章 改进的GPS:DGPS、SBAS、A-GPS和HSGPS
如果你想了解……
○哪几类误差影响定位精度
○DGPS指的是什么
○修正值是如何确定和转发的
○D信号如何修正有误差的位置测量
○在中欧可使用哪些DGPS服务
○EGNOS和WAAS指的是什么
○A-GPS是如何工作的
如果是这样,你应该阅读本章!
7.1 引言
尽管GPS最初计划用于军事目的,但目前主要还是用于民用,例如
测量、导航、定位、测速、测定时间等。GPS最初并未考虑用于精度要
求高、有安全措施或在室内使用的应用。
●为提高定位精度,引入了差分GPS(D-GPS)。
●为提高定位精度和完整性(可靠性,对于安全应用至关重要),实施了EGNOS和WAAS之类的SBAS(星基增强系统)。
●为提高在室内的灵敏度,或相应降低捕获时间,开始提供辅助
GPS(A-GPS)服务。
●不断改善GPS接收机的接收特性,通过高灵敏度GPS(HSGPS)技
术使接收机灵敏度不断提升。7.2 GPS误差源
在上一章里讨论了定位精度约为12m(HDOP为1.5时占全部测量数据
的95%),这不足以满足所有应用。为达到1m或更高的精度,需要采取
其他措施。GPS测量总误差来自不同的误差源。表6-1给出了这些误差的
成因和总误差。这些数值应被视为典型平均值,并且对于不同的接收机
也会有所不同。
经深入研究,发现误差起因如下:
●星历数据:在发送信号时卫星位置精度一般只能达到1~5m。
●卫星时钟:尽管每颗卫星都携带了4台原子钟,但时基会有偏
差。对于稳定性为10-13 的振荡器,其时间误差可达10ns。10ns的时间
误差产生的距离误差约为3m。
●电离层影响:电离层是位于距地面60~1000km之间的大气层。电
离层中的气体分子被严重电离。电离主要是由于太阳辐射所致(仅发生
在白天!)。信号以光速从卫星发出穿越真空。在电离层内,这些信号
的速度减慢,因此不能再被视为常数。电离的程度取决于时间和地点,在白天及赤道地区最为严重。如果电离强度已知,可在一定程度上通过
地理修正模型进行补偿。此外,如果信号速度的改变与频率相关,还可
通过使用双频GPS接收机进行额外修正。
●对流层影响:对流层是位于距地面0~15km之间的大气层。其误
差成因是气体分子密度和空气湿度的变化。密度随着高度的增加而下
降。密度或湿度的增加减缓了卫星信号的速度。为修正这一影响,采用
基于标准大气(P)和温度(T)的简化模型:
○H=高度(m)
○T=288.15K-6.5×10-3 H(K)
○P=1013.25mbar(T288.15K)5.256 (mbar)
●多径效应:GPS信号会被建筑物、丛林、山峰等反射,在到达接收机之前形成回波。信号会因干涉而失真。多径效应可通过选择测量位
置(避免反射)、测量时间和使用好天线等方法获得一定程度的补偿
(见图7-1)。
图7-1 在反射情况下对测量时间的影响
●接收机影响:还有一些误差是由于GPS接收机测量噪声和接收机
内的时间延迟造成的,可使用更先进的技术来削弱这一影响。
●卫星星座(包括遮挡(DOP))的影响:在6.4.2节中详细探讨了
这一影响。7.3 减小测量误差的可行性
降低造成测量误差的影响可显著提高定位精度。为减小测量误差使
用了各种方法,而且通常联合使用。通常采用的处理有:
●通过双频测量补偿电离层影响:电离层对测量误差的影响最大
(参见7.2节)。如果发射的无线电信号穿越电离层,低频信号受减缓
影响更为严重。通过使用两种不同的信号频率(如L1L2),可以在很
大程度上补偿电离层的影响。由于GALILEO和GPS(在现代化之后)将至
少以两个频率发送民用信号,因此极有可能会采用这一补偿原理。
信号传送时间的增加取决于电离的程度。电离层对于传送时间增加
的影响主要在于低频,对传送时间的影响与频率呈平方关系。
如果信号速度减慢,则会使计算出的卫星与接收机之间的距离变
长。伪距(PSR)的测量误差及其与频率和电离程度的关系如图7-2所
示。
图7-2 伪距测量误差及其与电离和频率的关系
由于每颗卫星的信号传输经过不同的电离区域,伪距测量误差对每
颗卫星也有所不同,因此对这些误差进行补偿非常重要。如果卫星以两
种频率发送导航信息(f1 和f2 ),可通过以下公式确定频率f1 的伪距测量误差(ΔPSR1 ) [1] :
PSR1 和PSR2 分别为测得的f1 和f2 的伪距。计算出的测量误差
(ΔPSRi )可用于对方程(13)中的PSRi 值进行修正(参见6.2.3
节)。
●地理修正模型:该模型主要用来补偿电离层和对流层的影响。修
正因子仅在应用于特定或有限区域时才有效。
●差分GPS(DGPS):通过与一个或若干个基站进行比较,可对各
种误差进行修正。可通过后处理或实时(RT)方式对来自这些基站的修
正数据进行评估。实时解决方案(RT DGPS)需要基站与移动接收机之
间进行数据通信。DGPS采用的差分处理方式有:
○实时DGPS,通常基于RTCM SC104标准;
☆基于信号行程时间延迟测量的DGPS(伪距修正,精度可达1m左
右)
☆基于载波信号相位测量的DGPS(精度可达1cm左右)
○后处理(事后对数据进行修正和处理)。
●通过选择地点和测量时间来提高卫星的“可见性”(参见6.3节有关DOP的说明)。
7.3.1 基于信号行程时间延迟测量的DGPS
基于信号行程时间测量(伪距或CA码测量)的DGPS的原理非常简
单。GPS基准站的位置已知并且是经过精确测量的点。GPS基准站通过4
颗或更多的卫星确定其GPS位置。如果已知GPS基准站的精确位置,就可
以计算出测量位置与实际位置的位置偏差,以及更为重要的测得的与各
颗卫星之间的伪距。这些偏差对GPS基准站附近200km范围内的所有GPS
接收机有效。在完成测量后,这些偏差或者立即通过无线电发送,或者
用于以后的修正(后处理,参见7.3.3节)。
重要的是,这种修正是基于卫星伪距值而不是对于GPS基准站的具
体位置偏差。偏差是基于到特定卫星的伪距,因而可能会因位置以及所
使用的卫星而变化。如果未考虑这一因素直接按基准站的位置偏差进行
修正,可能会导致错误的结果。图7-3 使用GPS基站的DGPS原理
7.3.1.1 工作原理详细说明
误差补偿可分三步完成:
1.确定基准站的修正值;
2.从基准站向GPS用户发送修正值;
3.对确定的伪距进行补偿以修正计算出的GPS用户位置。
[1] Elliot D.Kaplan,《了解GPS》,第二版,Artech House,第313页。7.3.1.2 确定修正系数
精确位置已知的基准站测量所有可见GPS卫星的L1信号的行程时间
(见图7-4),并使用这些测量值来计算相对于这些卫星的位置。这些
测量值中一般会带有误差。由于基准站的真实位置是已知的,因此可计
算出与每颗GPS卫星的实际距离。通过简单的减法可计算出实际值与测
量距离之差,并由此得到相应的修正系数。不同GPS卫星的修正系数是
不同的,且此修正系数只适用于数百千米范围内的GPS用户。
图7-4 确定修正系数7.3.1.3 发送修正值
如果这些修正值可用于广大区域内的其他GPS用户对其测量的伪距
进行补偿,则通过适当的媒介(电话、无线电等)立即将其发送(见图
7-5)。
图7-5 发送修正系数7.3.1.4 对测量伪距的修正
收到修正值后,GPS用户就可以对伪距进行补偿以确定到卫星的实
际距离(见图7-6)。这些实际距离随后可用于计算用户的准确位置。
通过这种方式可修正除由接收机噪声和多路径接收所致误差之外的所有
误差。
图7-6 对测量伪距的修正7.3.2 基于载波相位测量的DGPS
DGPS通过测量信号行程时间可达到1m的精度,但这仍不足以满足某
些要求,例如在解决有关测量方面的问题时。为了获得毫米级精度,必
须计算卫星信号的载波相位。
载波的波长约为19cm。可通过图示方法确定到卫星的距离(见图7-
7)。
图7-7 相位测量原理
由于N未知,因此相位测量较为模糊。通过在不同的时间观测若干
颗卫星,同时不断比较来自用户和基准站接收机的结果(在测量过程中
或之后),在经过大量的数学方程运算后可使计算出的位置精度达到数
毫米。7.3.3 DGPS后处理(信号行程时间和相位测量)
DGPS后处理是在现场测量完成后通过使用适当软件来确定修正系
数。基准数据可通过特定基准站或可公开访问的服务器系统获得。其缺
点在于:现场数据中存在的问题(例如,卫星信号接收条件不佳、文件
损坏等)有时要到完成修正系数计算并广播后才会发现,为此需要重复
整个过程。7.3.4 发送修正数据
DGPS服务从基准站收集数据并通过无线电将数据发送给移动接收
机。可以使用多种信道来播发这些修正数据。这些播发系统都拥有各自
的无线电技术特性和频率范围,用于DGPS时有其特定的优缺点(见表7-
1)。
许多国家建立了自己的系统用来发送修正数据。对所有这些系统的
全面介绍超出了本概述的范围,下面将分别介绍其中的一些系统。7.3.5 根据播发范围对DGPS进行分类
根据修正信号的播发范围可将各种DGPS服务作如下分类:
●本地DGPS:区域增强系统(LAAS),有时也称为陆基增强系统
(GBAS);
●地区DGPS;
●广域DGPS(WADGPS)或星基增强系统(SBAS):利用卫星发送
DGPS修正信号。在此情况下,使用的不是单个基准站,而是整个基准站
网络。7.3.6 修正信号发送标准
DGPS发射台发送信号行程时间和载波相位修正信号。大部分陆基增
强系统和某些星基广域DGPS(LandStar-DGPS、MSAT、Omnistar或
Starfire)根据RTCM SC-104标准发送DGPS修正数据。通常接收机必须
配备一个该服务特定的解码器以接收和处理数据。
而WAAS、EGNOS和MSAS之类的星基增强系统则采用RTCA DO-229标
准。由于RTCA的频率和数据格式与GPS兼容,因此现代GNSS接收机无需
额外的硬件就可处理RTCA数据,这与RTCM形成了对比(见图7-8)。
表7-2列出了DGPS修正信号采用的标准以及与GNSS具体相关的参
考。
图7-8 基于RTCM和RTCA标准的DGPS系统对比7.3.7 差分修正服务概览
差分修正服务概览如下所示:7.4 DGPS实时修正服务
7.4.1 引言
所有的修正数据都通过适当的方式(AM、短波、FM、GSM、互联
网、卫星通信等)发送到能被用户接收机接收的区域。在北美和欧洲,可收到来自多个公共DGPS服务的修正信号。根据服务的不同,购买DGPS
接收机时可能需要收取每年的许可费用或一次性费用。
在全世界有非常多的陆基DGPS服务,也称为陆基增强服务
(GBAS),下面对此作详细介绍。许多国家还提供了多个系统,为此下
节将介绍其中的一些服务。此外,将对一些或多或少提供了全球覆盖
(星基)的服务作较详细的介绍。7.4.2 基于RTCM SC-104的地面服务
●SAPOS:(德国测绘局卫星定位服务)是一项永久提供的DGPS服
务,可在整个德国使用。该系统以一个GPS基准站网络为基础。对于实
时修正值,使用FM无线电、长波、GSM及其自有的2m波段(VHF)频率发
送数据。FM无线电发射台以RASANT(无线电辅助卫星导航技术)格式播
发修正数据信号。它将用于数据传输的RTCM2.0格式转换为FM播音使用
的无线电数据系统(RDS)格式。SAPOS包含几种功能和精度各不相同的
服务 [1] :
○SAPOS EPS:实时定位服务
○SAPOS HEPS:高精度实时定位服务
○SAPOS GPPS:大地精确定位服务
●Swipos:(瑞士定位服务 [2] )通过移动电话网络或通过互联网
(GSMGPRS)分发修正数据。Swipos提供两类服务:
○Swipos-NAV(服务精度达到米级)
○Swipos-GISGEO(服务精度达到厘米级)
●无线电信标:无线电信标是遍布全世界的导航装置,主要沿海岸
分布。它们以300kHz左右的频率发送DGPS修正信号。根据广播电台的不
同,信号比特率在100~200bits之间。例如,2002年12月,AMSA(澳
大利亚海上安全局)在澳大利亚建立了一个由16个台站组成的完整DGPS
网络。这些台站以294~320kHz的频率发送信号,可在约275km的范围内
收到信号(见图7-9 [3] )。
[1] http:www.sapos.de
[2]
http:www.swisstopo.admin.chinternetswisstopoenhomeproductsservicesswipos.html
[3] http:www.amsa.gov.auPublicationsFact_sheetsDGPS_Fact_Sheet.pdf7.4.3基于RTCMSC-104的卫星服务
有数颗地球同步卫星不间断地发送修正数据。可使用Omnistar、Starfire和MSAT名下提供的各种服务。
图7-9 澳大利亚的无线电信标覆盖
●Omnistar通过6颗地球同步卫星发送修正数据(见图7-10 [4])。三种服务须付费,并且用户使用时必须配备专用的接收机解码器
[5] 。Omnistar通过L波段(1~2GHz)向地面发送信息。其基准地面站
遍布全世界。图7-10 6颗Omnistar卫星覆盖的地区(两个覆盖区之间相互重叠)
●NavCom Technology公司下属的Starfire也通过6颗地球同步卫星
发送修正数据(见图7-11 [6] )。服务需付费,并且用户使用时必须配
备专用的接收机解码器。Starfire通过L波段(1~2GHz)向地面发送
信息。其基准地面站遍布全世界。
图7-11 Starfire覆盖的地区
[4] http:www.seastar.co.ukcoverage.html
[5] http:www.omnistar.com
[6] http:www.navcomtech.comStarFire7.5 广域DGPS(WADGPS)
7.5.1 星基增强系统,SBAS(WAAS,EGNOS)
7.5.1.1 引言
星基增强系统(SBAS)用于提升GPS、GLONASS和GALILEO(待其运
营后)的功能,它通过地球同步卫星将GPS或GLONASS的修正数据和完整
性数据以GNSS频率播发。7.5.1.2 最重要的SBAS功能
由于定位精度和定位信息可靠性的改进,SBAS与GPS相比是一个相
当大的进步。与GPS不同,SBAS通过不同的地球同步卫星提供额外的信
号广播。
●通过修正数据提高定位精度:SBAS提供差分修正数据,由此可提
高GNSS的精度。首先是因信号通过电离层时的延迟造成的电离层误差,需要对此进行修正。电离层误差随着每天的时间发生变化,并且因地区
而异。为确保数据在大陆上有效,需要运营一个复杂的地面站网络,以
便计算电离层误差。除了电离层参数,SBAS还发送有关卫星位置(星
历)和时间测量的修正信息。
●提高完整性和安全性:SBAS监视每一颗GNSS的卫星,同时会在卫
星出错或发生故障后的6s内发出警报通知用户。只有当接收到的信号质
量一直低于特定限制时,才发送这类“是否”信息。
●通过播发导航信息提高可用性:SBAS地球同步卫星发送的信号与
GNSS的信号类似,但它缺少精确的时间数据。GNSS接收机可将这些信号
通过一种称为“伪距化”的过程解读出位置。7.5.2 现有系统和计划中的系统概览
尽管所有的星基增强系统(SBAS)覆盖了非常广阔的地区,但它必
须确保彼此之间兼容(互操作性),SBAS提供商互相合作,并在方法上
达成一致。通过使用RTCA DO-229C标准确保了兼容性。目前,在图7-12
中标出地区使用的兼容SBAS系统已处于工作或开发之中。
●北美(WAAS,广域增强系统):美国联邦航空局(FAA)领导了
广域增强系统(WAAS)的开发,该系统覆盖美国、加拿大和墨西哥(见
图7-12 [1] )。广域增强系统通过位于西经133°和西经107°的两颗卫
星(Anik F1R和Galaxy 15)工作 [2] 。
图7-12 广域增强系统覆盖地区
●欧洲(EGNOS,即欧洲地球同步卫星导航重叠服务):由ESA、欧
盟和欧洲安全导航组织组成的欧洲集团正在开发EGNOS。该系统旨在覆
盖欧洲民航会议(ECAC)所辖的地区。截至2009年2月,该系统尚未最
终转入运营,可能不会在安全性要求较高的应用中使用(如航空)。从
以下文献 [3] 可了解目前EGNOS卫星的信号发送情况。
●日本(MSAS,即多功能星基增强系统以及QZSS,即准天顶卫星系统):MSAS使用两颗地球同步卫星,QZSS计划使用多达3颗高地轨道卫
星(高倾角椭圆轨道,见图7-13)。这两路MSAS信号通过MTSAT-1R和
MTSAT-2卫星发送 [4] 。到2008年初,MTSAT-1R已投入运营。QZSS通过
发送GPS信号以及完整性或修正信号为GPS提供补充信息 [5] 。QZSS特殊
的高地轨道星座确保了在日本上空的天顶附近(仰角为75°~90°)至
少有一颗卫星可见(见图7-14 [6] ),这将改善狭窄的都市峡谷中的定
位精度。首颗QZSS卫星于2010年底投入运营。
图7-13 QZSS的卫星轨道和地面轨迹
图7-14 QZSS的卫星轨道、地面轨迹以及在东京上空的仰角
●印度(GAGAN,即GPS与GEO增强导航):印度空间研究组织(IS-RO [7] )开发了一种与其他SBAS兼容的系统,这种名为GAGAN的系统于
2008年开始通过国际海事卫星4F1 IOR发送测试信号。2009年之后,GAGAN将使用地球同步卫星GSAT-4运营。新的GAGAN卫星将定点于东经
82°。
●俄罗斯(SDCM,即差分修正和监控系统):俄罗斯为其疆域设计
了一个系统,以便通过各监测站控制GPS和GLONASS信号。地球同步卫星
将向俄罗斯疆域发送用于GPS和GLONASS的修正信号和完整性信号。
图7-15 WAAS、EGNOS、GAGAN和MSAS的位置和覆盖地区
地球同步卫星(表7-3 [8] )从高度约36000km的赤道上空向该地区
播发信号。某些SBAS卫星的位置目前尚不清楚。每颗卫星已分配了伪随
机码(PRN) [9] 。信号的广播频率与GPS(L1,1575.42MHz)相同,这
意味着接收SBAS地球同步卫星信号的接收机不需要额外的硬件投资。[1]
http:www.faa.govaboutoffice_orgheadquarters_officesatoservice_unitstechopsnavservicesgnsswaasnews
[2]
http:www.faa.govaboutoffice_orgheadquarters_officesatoservice_unitstechopsnavservicesgnsswaas
[3] http:esamultimedia.esa.intdocsegnosestbIMAGEtechimagetech_realtime.htm
[4] http:www.jma.go.jpjmajma-engsatelliteindex.html
[5] http:qzss.jaxa.jpis-qzssindex_e.html
[6] Quasi Zenith Satellite System Navigation Service Interface Specifications for
QZSS Draft
[7] http:isro.gov.in
[8] http:celestrak.comNORADelementssbas.txt
[9] http:www.losangeles.af.milsharedmediadocumentAFD-070530-036.pdf7.5.3 计划中的RNSS概览
RNSS是区域导航卫星系统(Regional Navigation Satellite
System)的缩写。RNSS与GPS、GLONASS和GALILEO互为对应补充,统称
为全球导航卫星系统(GNSS),从而实现全球范围的导航和定位。RNSS
只能用于有限地区的导航(例如独立的国家)。因为从SBAS可非常平滑
地过渡到RNSS,所以计划中的RNSS与SBAS同时推出。计划中的区域导航
卫星系统如下:
●印度(IRNSS,印度区域导航卫星系统):IRNSS是一个由3颗地
球同步卫星和4颗与赤道平面夹角为29°的地球同步卫星组成的导航系
统 [1] ,该系统将于2014年投入使用。
●日本(QZSS,准天顶卫星系统):该系统是对GPS的补充,参见
前节介绍(参见7.5.2节)。
[1] http:www.isro.orgnewslettersspaceindiaaprsep2006Satnavindustry.htm7.5.4 SBAS系统描述
其复杂的地面部分由若干基准站、地面控制中心和2~3个卫星地面
站组成(见图7-16)。每个系统采用了自己命名的台站。表7-4对这些
命名进行了比较。
图7-16 所有星基增强系统SBAS的工作原理
●基准站:在SBAS覆盖的地区有数个相互连成网络的基准站,这些
基站接收GNSS信号且其位置已被精确测定。每个基站确定出相对于卫星
的实际位置与计算位置之间的偏差(伪距),然后将数据发送给控制中
心。
●控制中心:控制中心对来自基准站的修正数据进行评估,确定各基站收到的所有GNSS信号的精度,检测可能由电离层湍流造成的不精确
性,并监视GNSS的完整性,然后将有关上述变化的数据通过分布各处的
卫星地面站加入到信号中并发送。
●卫星地面站:这些台站向不同的地球同步卫星播发信号。
●地球同步卫星:SBAS地球同步(地球静止轨道)卫星收到这些来
自地面站的信号后,将其播发给GNSS用户。与全球导航卫星不同,地球
同步卫星未配备星载信号发生器,而是配备的转发器,能将经地面处理
并发送给它的信号转发出去。这些信号以GNSS L1频率(1575.42MHz)
向地球发送,配备了相应的GNSS接收机的用户可接收并处理SBAS信号。7.5.5 使用RTCM SC-104的卫星DGPS服务
这些服务使用若干颗地球同步卫星不间断地向全球播发修正数据。
下面列出了这些服务中的一部分,它们采用RTCM SC-104标准并需要特
殊的解码器。
●MSAT:由加拿大国家研究委员会开发,该服务通过两颗地球同步
卫星播发加拿大地区的DGPS(CDGPS)信号。
●Omnistar(Fugro Group)和LandStar-DGPS(Thales Company)
通过6颗地球同步卫星各自播发修正数据(见图7-17)。这些服务需要
付费,并且用户必须通过特殊的接收机解码器才能使用。Omnistar和
Landstar通过L波段(1~2GHz)向地球播发其数据。基站分布在世界各
地,地球同步卫星位于中纬度地平线上方(10°~30°)。建立无线电
通信时需要卫星可见。
●Starfire是NavCom Technology公司的下属公司,通过3颗
Inmarsat地球同步卫星播发修正数据。此项服务需要付费,并且用户必
须通过特殊的接收机解码器才能使用。Starfire通过L波段(1~
2GHz)向地球播发其数据。其所属的基站遍布全世界。地球上纬度在
±76°之间的地区可以使用该服务。图7-17 LandStar-DGPS和Omnistar覆盖的地区7.6 使用DGPS和SBAS可达到的精度
表7-5给出了使用和未使用DGPSSBAS时所能达到的典型定位精度。7.7 辅助GPS(A-GPS,AGPS)
7.7.1 引言
市场上结合了移动无线功能(如GSM、UMTS等)和卫星导航功能
(如GPS)的设备数量在不断增加(见图7-18)。这种组合通常用于基
于位置的服务(LBS)。可以说这些设备并非总处于工作状态,尤其是
定位通过GPS完成时更是如此,原因在于GPS接收机的功耗限制了电池工
作时间。
图7-18 移动接收机及集成了GPS模块的框图
由于GPS设备很少工作,它有可能没有关于卫星位置的信息。在停
用2h或更长的时间后,为能开始工作它必须首先下载卫星的轨道数据。
GPS接收机获取轨道数据并计算出首次位置一般至少需要18~36s的时间
(该时间称为首次定位时间:TTFF)。在不利的接收条件下(例如,城
区高层建筑妨碍了对天空的直视时),可能需要数分钟才能完成首次位
置的计算。启动慢是GPS固有的限制,无法通过改进接收机技术来克
服。当缺少轨道数据时,GPS接收机必须执行一次完整的搜索过程,以
便找到可用的卫星、下载数据和计算位置。在编码-频率域内对大约30
颗GPS卫星进行搜索非常耗时,编码-频率域每级的积分时间通常至少需
要1ms(1个CA码周期)。如果将频率范围按50Hz的步长划分(即频率
间隔为2×600050Hz=240Hz),则需要对多达1023×50=51150个位置
(bins)进行搜索(需要51s)。另请参见7.8节。7.7.2 A-GPS原理
在信号较弱时可通过提供额外的卫星轨道数据和其他GPS信息来快
速定位和测量。这些信息可通过其他信道获得,例如通过GSM、GPRS、CDMA或UMTS。这一应用称作辅助服务,并用于辅助GPS(A-GPS或
AGPS)。A-GPS是一种使用辅助数据来加速定位的功能或服务。GPS接收
机通过移动通信网络或直接经互联网获得辅助数据。辅助数据中包含以
下信息:
●卫星星座(星历);
●精确轨道数据(星历、轨道);
●时间信息;
●GPS接收机的多普勒频率和频移(误差)。
通过使用这些辅助数据,即便在不利的信号条件下GPS接收机也能
够迅速定位。在弱信号条件下,这通常是获取定位的唯一途径。取决于
辅助数据的复杂性和完整性,启动时间可能会显著缩短。剩余的启动时
间取决于GPS信号的强度。通常辅助信息的可用性和精度越高,启动时
间就越短。
图7-19给出了在使用各种辅助数据时近似的启动时间(首次定位时
间,即TTFF) [1] 。图7-19 使用不同的辅助数据时首次定位时间(TTFF)是信号强度的函数
集成了GPS设备的移动台仍需至少能看到4颗卫星。使用A-GPS时,GPS接收机需要一个用于接收辅助数据的接口。
通过减少轨道数据的接收时间从而最大程度节省了启动时间。此
外,如果已知GPS接收机的多普勒频率和频移,还可以限定搜索区域
(见图7-20)。这就加快了信号捕获,从而节省了时间。图7-20 使用A-GPS可减少搜索区域并加快搜索进程
[1] ......
(瑞士)让-马利・佐格(Jean-Marie Zogg)著 ?中文在线数字出版集团股份有限公司,2015-2016
数字版图书
GPS卫星导航基础(瑞士)让-马利・佐格(Jean-Marie Zogg)著.北
京:中文在线数字出版集团股份有限公司,2016.3.
CAEBN:7-001-000-60593368-1
分类号:全球定位系统 P228.4
互联网出版许可证:新出网证(京)字045号
GPS卫星导航基础
(瑞士)让-马利・佐格(Jean-Marie Zogg) 著
出 品 人:童之磊
责任编辑:朱厚权
出版发行:中文在线数字出版集团股份有限公司
地 址:北京市东城区安定门东大街28号E座9层
邮政编码:100007
网 址:www.chineseall.com
首次发布:2016.3.21
更新时间:2016.10.11
上架建议:天文学、地球科学
本书由中航出版传媒有限责任公司授权中文在线数字出版集团股份有
限公司互联网出版与发行,未经书面授权,不得在任何地区以任何方式
反编译、仿制或节录本书文字或图表。本书电子版如有错讹,敬请读者
指正,我们会及时更新版本。
电子邮箱:copyright@chineseall.com
中文在线数字出版集团股份有限公司为作者和相关机构提供数字出版
服务。
纸质版图书在版编目数据
出版社:航空工业出版社
ISBN:978-7-80243-789-0
出版时间:2011.8.1目 录
电子,编程,计算机技术,编程教程,编程资料,python教程,Java教
程,android教程,github,ai,爬虫
内容提要
前言
自序
导论
第1章 卫星导航快速入门
1.1 测量信号传输时间的原理
1.1.1 卫星导航的基本原理
1.1.2 信号行程时间
1.1.3 测定位置
1.1.4 时间误差的影响和修正
第2章 坐标系
2.1 引言
2.2 地球体
2.3 椭球与基准面
2.3.1 椭球
2.3.2 制定本地参考椭球与基准面
2.3.2.1 本地参考椭球
2.3.2.2 基准面、地图参考系
2.3.3 国家参考系
2.3.4 国际参考椭球WGS-84
2.3.5 从本地参考系变换至世界参考椭球
2.3.5.1 大地基准面
2.3.5.2 基准面转换
2.3.6 转换坐标系2.3.6.1 将笛卡儿坐标转换为椭球坐标
2.3.6.2 将椭球坐标转换为笛卡儿坐标
2.4 平面地区坐标、投影
2.4.1 高斯-克吕格投影(横切墨卡托投影)
2.4.2 UTM投影
2.4.3 瑞士投影系(正形双重投影)
2.4.4 全球范围的坐标转换
2.4.4.1 示例:将WGS-84坐标转换为CH-1903坐标
2.5 栅格地图地理对位
2.5.1 引言
2.5.2 变换基础
2.5.3 确定变换坐标
2.5.4 确定变换参数a,b,c,d,e,f
2.5.5 示例(将栅格地图变换为WGS-84)
第3章 卫星技术基础
3.1 开普勒定律
3.1.1 开普勒第一定律
3.1.2 开普勒第二定律
3.1.3 开普勒第三定律
3.2 卫星轨道
3.3 轨道高度
3.4 无线电频率
3.5 时间系统
3.5.1 国际原子时(TAI)
3.5.2 协调世界时(UTC)
3.5.3 GPS时
3.5.4 卫星时3.5.5 地方时
第4章 GNSS技术:GPS示例
4.1 引言
4.2 全系统描述
4.3 空间部分
4.3.1 卫星的分布和运动
4.3.2 GPS卫星
4.3.2.1 卫星结构
4.3.2.2 通信链路预算分析
4.3.2.3 卫星信号
4.3.3 生成卫星信号
4.3.3.1 简化框图
4.3.3.2 详细框图
4.4 控制部分
4.4.1 失效可能性与人为信号失真(SA)
4.5 用户部分
4.6 GPS导航电文
4.6.1 引言
4.6.2 导航电文的结构
4.6.3 子帧包含的信息
4.6.4 遥测字(TLM)与转换字(HOW)
4.6.5 25页的细分
4.6.6 星历与年历数据比较
4.7 GPS现代化
4.7.1 新调制方法,BOC和MBOC
4.7.1.1 BPSK(1)―调制
4.7.1.2 BOC―调制简介4.7.1.3 MBOC调制(多路BOC,MBOC(6,1,111))
4.7.2 GPS现代化
第5章 GLONASS、GALILEO和北斗系统
5.1 引言
5.2 GLONASS:俄罗斯系统
5.2.1 GLONASS的建成
5.3 GALILEO
5.3.1 概述
5.3.2 计划中的GALILEO服务
5.3.2.1 开放服务,OS
5.3.2.2 商业服务,CS
5.3.2.3 人身安全服务,SoL
5.3.2.4 公共管制服务,PRS
5.3.2.5 搜索和救援,SAR
5.3.3 精度
5.3.4 GALILEO技术
5.3.4.1 信号频率
5.3.4.2 时间计划
5.3.5 GNSS最重要的三个特性
5.4 中国的北斗1代和北斗2代系统
5.4.1 目前的系统:北斗1代
5.4.2 未来的系统:北斗2代
第6章 计算位置
6.1 引言
6.2 计算位置
6.2.1 测量信号行程时间的原理(伪距估算)
6.2.2 方程的线性化6.2.3 解方程
6.2.4 小结
6.3 确定行程时间的具体方法
6.3.1 时间系统
6.3.2 确定行程时间的具体方法
6.3.2.1 第1步:通过相关性确定信号到达时间
6.3.2.2 第2步:对数据和或导航电文进行重构
6.3.2.3 第3步:确定发送时间
6.3.3 确定行程时间误差
6.3.4 影响行程时间的其他因素
6.4 误差分析与精度因子
6.4.1 引言
6.4.2 卫星几何形态对精度的影响,DOP值
6.4.2.1 引言
6.4.2.2 图解DOP值成因
6.4.2.3 DOP值的实际含义
6.4.2.4 总误差
6.4.2.5 计算DOP值
第7章 改进的GPS:DGPS、SBAS、A-GPS和HSGPS
7.1 引言
7.2 GPS误差源
7.3 减小测量误差的可行性
7.3.1 基于信号行程时间延迟测量的DGPS
7.3.1.1 工作原理详细说明
7.3.1.2 确定修正系数
7.3.1.3 发送修正值
7.3.1.4 对测量伪距的修正7.3.2 基于载波相位测量的DGPS
7.3.3 DGPS后处理(信号行程时间和相位测量)
7.3.4 发送修正数据
7.3.5 根据播发范围对DGPS进行分类
7.3.6 修正信号发送标准
7.3.7 差分修正服务概览
7.4 DGPS实时修正服务
7.4.1 引言
7.4.2 基于RTCM SC-104的地面服务
7.4.3基于RTCMSC-104的卫星服务
7.5 广域DGPS(WADGPS)
7.5.1 星基增强系统,SBAS(WAAS,EGNOS)
7.5.1.1 引言
7.5.1.2 最重要的SBAS功能
7.5.2 现有系统和计划中的系统概览
7.5.3 计划中的RNSS概览
7.5.4 SBAS系统描述
7.5.5 使用RTCM SC-104的卫星DGPS服务
7.6 使用DGPS和SBAS可达到的精度
7.7 辅助GPS(A-GPS,AGPS)
7.7.1 引言
7.7.2 A-GPS原理
7.7.3 基准网络
7.7.4 A-GPS网络
7.7.5 采用在线辅助数据的A-GPS方式(实时A-GPS)
7.7.6 采用离线辅助数据的A-GPS方式(预测轨道)
7.7.7 架构7.7.8 控制平面架构
7.7.9 用户平面架构
7.7.10 架构优势
7.7.11 OMA安全用户平面定位架构(OMA-SUPL)
7.8 高灵敏度GPS(HSGPS)
7.8.1 提高振荡器稳定性
7.8.2 天线
7.8.3 噪声系数因素
7.8.4 相关器和相关时间
7.9 GNSS转发器或转发天线
7.10 室内用伪卫星
第8章 数据格式与硬件接口
8.1 引言
8.2 数据接口
8.2.1 NMEA-0183数据接口
8.2.1.1 NMEA协议结构
8.2.1.2 GGA数据集
8.2.1.3 GLL数据集
8.2.1.4 GSA数据集
8.2.1.5 GSV数据集
8.2.1.6 RMC数据集
8.2.1.7 VTG数据集
8.2.1.8 ZDA数据集
8.2.1.9 计算校验和
8.2.2 从NMEA转换为KML
8.2.2.1 Google Earth和KML简介
8.2.2.2 将NMEA转换为KML的方法8.2.3 DGPS修正数据(RTCM SC-104)
8.2.3.1 RTCM电文头(2.3版)
8.2.3.2 RTCM电文类型1(2.3版)
8.2.3.3 RTCM电文类型2~9(2.3版)
8.2.4 私有数据接口
8.2.4.1 示例:用于u-blox GNSS接收机的UBX协议
8.3 硬件接口
8.3.1 天线
8.3.2 供电
8.3.3 时间脉冲:1 PPS与时间系统
8.3.4 将TTL电平转换为RS-232
8.3.4.1 串行通信基础
8.3.4.2 确定电平及其逻辑分配
8.3.4.3 将TTL电平转换为RS-232
第9章 GNSS接收机
9.1 GNSS手持接收机基础
9.2 GNSS接收机模块
9.2.1 GNSS模块基本设计
第10章 GNSS应用
10.1 引言
10.2 各种应用介绍
10.2.1 基于位置的服务(LBS)
10.2.2 商业和工业应用
10.2.3 通信技术
10.2.4 农业和林业
10.2.5 科学与研究
10.2.6 旅游和运动10.2.7 军事
10.2.8 时间测定
附录
A 互联网上的资源
A.1 概要报告和链接
A.2 差分GPS
A.3 GPS机构
A.4 GNSS新闻组和GNSS技术刊物
B 资料来源
C 版本历史内容提要 本书旨在详细描述全球定位系统及相关的技术,讲述GPS如何工作
以及如何应用,包括基本原理、系统结构、信号特点、坐标系转换、位
置计算、差分技术、辅助GPS、GLONASS、GALILEO与北斗等其他GNSS介
绍、数据格式与硬件结构,并包含了GNSS领域的新技术,以及GNSS应用
等内容。本书条理清楚、内容丰富,易于理解和掌握,为GPS开发和GPS
应用人员提供所需的参考内容,帮助读者快速和全面地理解GPS相关技
术。
本书可以作为卫星导航定位技术开发者、导航技术应用者、软件工
程师、硬件工程师、高等院校师生的工具书和参考书。前言
我身在地球何处?
对这个看似简单的问题的回答有时会关乎生死。试想一下对于急于
找到一处安全着陆地点的飞行员,或者遇险船只上寻求救助的船员,或
者在群山中因恶劣天气迷失了方向的徒步旅行者,了解自己的位置是多
么重要,它蕴含了不可胜数的含义和用途。
尽管未必会遇到上述的戏剧性场面,但在我们的日常生活中,有时
位置信息的确会对我们有重要影响。我该如何找到我要去的地方?企业
如何跟踪其移动资产?政府如何实施道路收费系统?公交车应该在何时
何地触发下一个红绿灯?位置信息潜在的应用和使用似乎是无止境的。
对人类而言,我们在这颗蓝色星球上的位置始终都是一件极为重要的事
情,而今天获得我们的准确位置已容易得令人难以置信。
在近年来最令人眼花缭乱的技术进步中,卫星导航或全球导航卫星
系统(GNSS)技术发展可谓突飞猛进。在短短几年内,卫星导航从科幻层面变为科学现实,形成了一个充满活力、快速成长的产业,为全世界
客户提供了迅速可靠、随需随用的定位技术。
作为这个引人入胜、生机勃勃的行业的领军者,u-blox AG团队秉
承创新和质量理念致力于为卫星导航爱好者提供服务。作为客户服务承
诺的一部分,u-blox很荣幸地为您提供这本帮助您进入非凡的卫星导航
世界的著作。
本书旨在提供对卫星导航系统的功能及其应用的综合概览,同时审
视当前的研发水平、变化和进展。本书是为对此项技术感兴趣的用户和
与卫星导航应用有关的专家而编写的。本书在结构上由浅入深,读者能
够从简单的事实过渡到较为复杂的概念。既介绍了卫星导航的基本理
论,又补充了一些其他的重要内容。本书还可为了解此项技术提供一些
额外帮助,尤其是在现有的卫星导航接收机、模块和集成电路方面。重
要的新进展将在各个章节加以介绍。要了解GNSS设备目前所使用的各种
坐标系并非易事,为此专门用一个独立的章节介绍地图学。
我们希望本书能够对您有所帮助,而您也能像我们一样热衷于与定
位有关的技术。这个能够回答“我身在地球何处?”的世界和产业的确
是魅力无穷。自序 1990年,我从瑞士库尔乘火车到布里格。为打发旅途中的时间,我
随身带了几本旅行杂志。当我翻阅一本美国杂志时,不经意间看到了一
篇介绍有关新的卫星定位和导航系统的技术文章。这种新系统称为全球
定位系统或GPS,利用一些美国卫星来确定全球任意一点的位置,精度
约为100m [1] 。
作为一名热爱运动的运动员和登山者,我有很多次在危险的情况下
由于对所处的地区不了解而放弃。因此,这种即便在雾中或是夜间都能
通过GPS接收机确定我所处的位置的革命性的前景深深地吸引了我。
GPS开始占据我的生活。我还唤起了我所在学校里大批热衷此项技
术的学生们的热情,他们最终花费了数个学期并在此科目上毕业。我感
到自己已逐渐成为这个学科真正的专家,开始为各类出版物撰写有关
GPS的技术文章。
为何要阅读本书?
要想了解卫星导航的许多新兴和迷人的潜在应用的发展,需要先了
解这些系统工作的方式。如果你熟悉该系统的技术背景,就能够开发和
使用新的定位和导航设备。本书既探讨了可行性,也探讨了该系统的一
些限制,以便你抛开不切实际的期望。
本书是怎样诞生的?
2000年,我决定减少花在我所在大学授课上的时间,以便去了解商
业卫星导航产业的全貌。我希望能为直接从事卫星导航的公司工作,而
正好有一家名为u-blox AG的公司热情地接纳了我。u-blox AG要求我编
写一本送给客户的介绍材料,于是就有了这个由以往文章和新编章节组
成的概述。
真诚祝福
我真心地希望在全球卫星的导航下你的旅程一帆风顺,并深信借助这一迷人的技术领域你能引领自己踏上成功之路。愿你在阅读中获得乐
趣!
如果你有疑问或发现书中有误,请发送邮件到GPScompendium@u-
blox.com与我们联系。
Jean-Marie Zogg
2009年2月 [1] 那是在1990年,而现在定位数据的精度已达5~10m!导论 卫星导航是一种通过全球导航卫星系统(GNSS)精确测定地球上任
何一点的位置和时间的方法。目前,卫星导航接收机可供个人定位、商
业定位、导航、勘测和测定精确时间之用,用作个人、休闲和商业方面
的用途也日渐增多。
使用GNSS可在地球表面上的任何一点精确测定以下数值(见图
1):
图1 卫星导航的基本功能
(1)精确位置(经度、纬度和高度坐标),精度范围在20m到约
1mm之间。
(2)精确时间(协调世界时,即UTC),精度范围在60ns到约5ns
之间。
可由上述数值推导出行程(路径)的速度和方向,这些数值由围绕
地球运行的卫星提供。行程的速度也可通过多普勒频移测量直接确定。
截至2009年,美国国防部(DoD)研发和运营的全球定位系统
(GPS)是唯一全面运营的GNSS。高速发展的卫星导航产业以GPS为中心
迅猛成长,因此术语GPS与卫星导航有时可互换使用。本文着重介绍
GPS,同时也介绍和讨论其他一些新出现的GNSS。
GPS(该系统的全称为:授时与测距导航系统全球定位系统,即NAVSTAR-GPS),设计为军民两用。民用信号SPS(标准定位服务)可由
公众自由使用,而军用信号PPS(精确定位服务)只有经授权的政府部
门才能使用。首颗卫星于1978年2月22日入轨,计划在高度为20180km的
6个不同轨道平面内配置32颗围绕地球运转的卫星。卫星轨道与赤道之
间的倾角为55°,确保在地球上的任何一点至少可与4颗卫星进行无线
电通信。每颗卫星绕地球转一周约需12h,卫星上载有4个原子钟。
在GPS的研制过程中,重点放在以下三个方面:
(1)无论其是处于运动状态还是静止状态,它必须能够为用户提
供测定位置、速度和时间的能力。
(2)它必须具有连续性、全球性、全天候的高精度三维定位能
力。
(3)它必须具有民用潜力。
在此后的5~6年里,可能会有3个完全独立的GNSS投入使用。美国
将继续提供GPS服务,而俄罗斯的GLONASS和欧盟的GALILEO也将全面投
入运营。所有这些系统都将进行更新和改进,以提高可靠性并实现新的
潜在服务和应用 [1] 。
本概述将探讨卫星导航的基本原理,进而介绍具体应用和技术。作
为先驱和行业标准的GPS因其重要性而受到特别关注,而对于差分
GPS(DGPS)、辅助GPS(AGPS)以及设备接口等这些重大的发展,将在
单独的章节加以介绍。这样安排的目的是为了让读者打下牢固的基础,以了解这一令人着迷且日益重要的领域。
[1] 这里面将有一些重要的航空学进展,其中包括通过卫星导航来实现进场和着陆。第1章 卫星导航快速入门 你是否想了解……
○如何用简单的方法测定闪电的距离
○卫星导航的基本原理是什么
○GPS卫星上有多少个原子钟
○如何在平面上确定位置
○为什么通过卫星导航测定位置需要4颗卫星
如果是这样,你应该阅读本章!
1.1 测量信号传输时间的原理
几乎可以肯定,你在某个雷雨期间曾经尝试计算与电闪雷鸣之间的
距离。这个距离计算起来相当容易(见图1-1):距离=从看到闪电(起
始时间)直至听到雷声(终止时间)的时间乘以声音的速度(约为
330ms)。起始时间与终止时间之差就是信号行程时间。在此情况下,信号为在空气中传播的声波。
图1-1 确定闪电的距离
距离=行程时间×声速
卫星导航的原理与此相同,是通过与位置已知的参考卫星的距离来计算自身的位置。在此情况下,可根据从卫星上发送的无线电波的行程
时间计算距离。
1.1.1 卫星导航的基本原理
卫星导航系统均使用相同的基本原理来测定坐标:
●位置已知的卫星发送规则时间信号。
●根据测量出的无线电波(以光速c=300000kms穿越空间的电磁信
号)行程时间来计算接收机的位置。
我们可以通过一个简单的模型更清楚地了解这一原理。假设我们坐
在汽车里,需要在一个又长又直的街道上确定我们的位置。在街道的终
点有一部无线电发射机,每秒发送一个时间信号脉冲。我们在汽车上携
带了一台时钟,它与发射机上的时钟同步。通过测量从发射机到汽车消
耗的行程时间,就能计算出我们在街道上的位置(见图1-2)。
图1-2 通过测量行程时间测定距离的最简单的例子
距离D可通过行程时间Δτ乘以光速c得出。
D=Δτ・c
由于我们汽车上所载的时钟可能无法与发射机上的时钟精确同步,因而计算出的距离与实际行程距离会存在偏差。在导航中这个不真实的
距离被称为伪距。在本例中,1微秒(1μs)的行程时间误差产生了300m的伪距。
为我们的汽车配备一台精确的原子钟可以解决这一问题,但这可能
会超出我们的预算。另一个解决方案需要使用第二部同步时间信号发射
机,它与第一部发射机的间距(A)是已知的。即使车载时钟不够精
确,通过测量两个行程时间也能准确地计算距离(D)。
图1-3 使用两部发射机时,即使存在时间误差也能计算出准确位置
我们可以看出,为了能够精确地计算在一条直线(沿一个维度方向
延伸所确定的一条直线)上的位置和时间,我们需要两部时间信号发射
机。由此我们可以得出以下结论:如果在计算位置时采用的车载时钟不
同步,时间信号发射机的数量需要比未知维度的数量多一个。
例如:
●在一个平面上(沿两个维度延伸)我们需要3部时间信号发射
机。
●在三维空间里我们需要4部时间信号发射机。
卫星导航系统使用卫星作为时间信号发射机。为测定3个所需坐标
(经度、纬度和高度)和精确的时间,至少需要与4颗卫星通信(见图1-4)。我们在下节将对此加以详细说明。
图1-4 确定经度、纬度、高度和时间需要4颗卫星1.1.2 信号行程时间
卫星导航系统中的卫星采用较高的轨道围绕地球运转,并且其分布
方式使地面上的任意一点至少可以直接看到4颗卫星。
这些卫星全都配备有星载原子钟。原子钟是已知最精确的时间计量
仪器,每30000至1000000年的最大误差不超过1s。为使它们更加精确,从地球上的各个控制点定期对其进行调整或同步。GNSS中的卫星向地球
发送其精确位置及其时钟时间。这些信号以光速(300000kms)传播,到达地球表面卫星正下方的位置大约需要67.3ms。信号每多行进1km需
要额外的3.33ms。只需一部接收机和一台精确的时钟就可以计算位置。
通过将卫星信号到达的时间与发送该信号时星载时钟的时间进行比较,就能够测定信号的行程时间(见图1-5)。
图1-5 确定信号行程时间
如同上文汽车的例子,与卫星之间的距离D可通过已知的信号行程
时间Δτ确定:
距离=行程时间×光速
D=Δτ・c1.1.3 测定位置
设想一下你正在穿越广阔的高原,想知道自己身处何处。两颗卫星
正在你上方的远处围绕地球运转,并发送它们的星载时钟时间和位置。
根据测得的这两颗卫星的信号行程时间,你可以绕着卫星以D1 和D2 为
半径画两个圆。每个半径分别对应于计算出的与卫星之间的距离。相对
于卫星的所有可能位置均在这两个圆上。如果将高于卫星的位置去掉,接收机的位置就在卫星下方两圆的交点处(见图1-6)。因此,在XY平
面只需两颗卫星就足以测定位置。
图1-6 接收机的位置为两圆的交点
在现实世界中,需要在三维空间而不是在平面内测定位置。由于平
面与多出了一个维度(高程Z)的三维空间之间的差别,测定真实位置
需要用到额外的第三颗卫星。如果已知与这3颗卫星的距离,所有可能
的位置就在3个分别以计算出的距离为半径的球面上。该位置是所有3个
球面的交点(见图1-7)。图1-7 位置由所有3个球面的交点确定1.1.4 时间误差的影响和修正
只有接收机与卫星上的星载原子钟同步,也就是在可精确测定信号
行程时间的情况下,上节中的结论才能成立。即便卫星到地面上导航接
收机的行程时间测量相差只有1μs,也会造成300m的位置误差。由于所
有GNSS卫星的星载时钟都是同步的,在3次测量中的信号行程时间误差
量是相同的。此时我们可以求助于数学。
我们知道,如果进行含有N个未知变量的数学计算,我们需要用N个
独立的方程来表示它们。如果时间测量伴有不变的未知误差(Δt),在三维空间里我们将有4个未知变量:
●经度(X);
●纬度(Y);
●高程(Z);
●时间误差(Δt)。
这4个变量需要4个方程,而这组方程可从4颗相互独立的卫星得
到。
构建卫星导航系统时,有意将其设计成在地球上的任意一点至少可
以“看到”4颗卫星(见图1-8)。因此即便接收机一方的时钟不准确造
成时间误差,计算出的位置精度仍可达到5~10m。图1-8 在三维空间里测定位置需要4颗卫星第2章 坐标系 如果你想了解……
○地球体是什么
○为何地球基本上被视为椭球
○为何世界上使用的各种地图参考系超过200个
○WGS-84指的是什么
○如何将一种基准面转换为另一种
○笛卡儿坐标和椭球坐标是什么
○各国的地图是如何绘制的
○如何由WGS-84坐标计算出国家坐标
如果是这样,你应该阅读本章!
2.1 引言
使用GNSS时的一大难题是世界上存在着大量各不相同的坐标系。因
此,测量和计算出的位置并非总是能与假定的位置相对应。
为了理解GNSS是如何工作的,需要了解测绘学的一些基础知识:这
是一门对地球表面进行测量和制图的科学。如果没有这些基础知识,就
难以理解将适当的地图参考系(基准面)和坐标网组合在一起的必要
性。其中涉及到要从100多个不同的基准面以及10个左右的不同坐标网
中进行选择。如果组合不当,位置可能会偏离数百米。2.2 地球体
自哥伦布时代起人们就已经知道地球是圆的。但地球究竟有多圆?
描述我们这个蓝色星球的外形一直是一项充满挑战的科学工作。数百年
来,提出了若干个不同的模型以尽可能真实地表述地球的近似真实外
形。
地球体代表了地球的真实外形,平均海平面的零点即为其表面。该
表面由地球重力所决定,因而其几何描述极其复杂。研究人员借用了希
腊文中的地球一词,将该表面的几何外形称为地球体(Geoid)(见图
2-1)。
图2-1 地球体是地球表面的近似外形
由于地球质量分布不均,造成海洋的水准面并不在几何外形的表面
上,因而采用了与之相似的椭球。地球体与地球真实外形的差别在于它
是理论形体,表面各处均以适当的角度嵌入了重力场线。
地球体通常用作测量高度的高程基准。例如,瑞士测量高度的基准
点是日内瓦港的“Repère Pierre du Niton”(RPN,即皮埃尔杜镭射
气地标,373.600m)。该高程源自相对于马赛港(平均海拔0.00m)的
点对点测量。2.3 椭球与基准面
2.3.1 椭球
在进行计算时,地球体是难以处理的形体。因此在进行日常的测量
工作时需要一种简单、便于定义的外形。这种用作替代的表面就是椭
球。如果一个椭圆的表面绕其对称的南北极轴线旋转,就会得到一个椭
球体(见图2-2)。
椭球由两个参数确定:
●长半轴a(位于赤道面);
●短半轴b(位于南北极轴)。
椭球与理想球体的外形偏差量称为扁率(f)。
图2-2 生成椭球2.3.2 制定本地参考椭球与基准面
2.3.2.1 本地参考椭球
在处理椭球时必须小心,以确保自然垂线不是垂直嵌入到椭球上,而是地球体上。因此标准椭圆与自然垂线并不一致,两者之差代表
了“垂直偏差”(见图2-4),也就是说,地球表面上的点的投影会不
正确。为尽量减小这一偏差,各国发展了各自制定的非地心椭球作为基
准面用于测量工作(见图2-3)。在选择长半轴a、短半轴b以及中点
时,尽量使地球体和椭球能与各国的版图精确匹配。
图2-3 制定本地参考椭球2.3.2.2 基准面、地图参考系
依据某些类型的椭球制定的国家或世界地图参考系称为基准面。在
使用GNSS接收机导航时,根据所使用地图的不同,应确保相关地图参考
系已输入到接收机中。
目前可供使用的地图参考系超过120个,例如:瑞士的CH-1903、北
美的NAD83以及作为国际标准的WGS-84。
椭球非常适合于描述用经度和纬度表示的点的位置坐标。高程信息
要么基于地球体,要么基于参考椭球。测得的正高H(基于地球体)与
基于参考椭球的椭球高程h之差称为大地水准面起伏N(见图2-4)。2.3.3 国家参考系
整个欧洲都使用了各不相同的参考系,并且在测量过程中技术上使
用的各种参考系都有各自的名称。其中一些基础的非地心椭球如表2-1
所示。如果使用的椭球相同,则按其本地基准所对应的不同国家加以区
分。
图2-4 地球体与椭球之间的差异2.3.4 国际参考椭球WGS-84
GNSS接收机所进行的详细显示和计算主要涉及WGS-84(世界测地系
统1984)参考系。WGS-84坐标系依据地球中心进行位置标定。该系统称
为ECEF(以地球为中心,地球固定不动)。WGS-84坐标系为三维右旋笛
卡儿坐标系,坐标原点位于约等于地球总质量的椭球的质心(相当于地
心)。
椭球的X轴正向(见图2-5)位于赤道面(由赤道包围而成的假想平
面)上,自质心经过赤道与格林尼治子午线的交点(零子午线)。Y轴
也在赤道面上,相对于X轴向东偏转90°。Z轴与X轴和Y轴垂直,经过地
理北极。
WGS-84椭球的参数如表2-2所示。
通常采用椭球坐标(φ,λ,h)而不是笛卡儿坐标(X,Y,Z)来
做进一步处理(见图2-6)。φ对应纬度,λ对应经度,h对应椭球高度
(例如,椭球上的P点对应的椭球坐标(φ,λ,h))。
图2-5 笛卡儿坐标系示意图图2-6 椭球坐标系示意图2.3.5 从本地参考系变换至世界参考椭球
2.3.5.1 大地基准面
参考系通常为本地参考系,而不是地心椭球参考系。本地参考系
(如CH-1903)与全球、地心系统(如WGS-84)之间的关系称为大地基
准面。如果本地参考系与全球椭球参考系的坐标轴平行,或者在某个局
部区域可视为平行,则基准面变换所需的全部要素为3个位移参数,称
为基准面位移常数ΔX、ΔY及ΔZ。
还可能需要加入三个旋转角φx 、φy 、φz 以及一个比例系数
m(见图2-7),因此全部变换公式含有7个参数。大地基准面指定了本
地三维笛卡儿坐标系相对于全球坐标系的位置。
表2-3给出了各种基准面参数的示例。其他数据可从以下注明的出
处获得 [1] 。
图2-7 大地基准面[1] http:www.geocities.commaprefmapref.html2.3.5.2 基准面转换
根据定义,基准面转换是指将一个三维笛卡儿坐标系(如WGS-
84),通过三维平移、旋转和拉伸转换为其他坐标系(如CH-1903)。
为实现转换,大地基准面必须是已知的。详尽的转换公式可从专业文献
[1] 处获得,也可以通过互联网直接进行转换 [2] 。完成转换后,可将
笛卡儿坐标变换为椭球坐标。
[1] B.Hofmann-Wellenhof:《GPS实践》,Springer-Verlag,维也纳,1994年,ISBN 3-211-
82609-2
[2] 联邦地形办公室:http:www.swisstopo.ch2.3.6 转换坐标系
2.3.6.1 将笛卡儿坐标转换为椭球坐标
笛卡儿坐标和椭球坐标可从一种表述转换为另一种。由于φ和h出
现在以下方程的右侧,这些方程还须经过反复推导才能得到精确解。2.3.6.2 将椭球坐标转换为笛卡儿坐标
可将椭球坐标转换为笛卡儿坐标。
x=[RN +h]・cosφ・cosλ
y=[RN +h]・cosφ・sinλ
z=[RN ・[1-e2 ]+h]・sinφ2.4 平面地区坐标、投影
通常军事测量采用椭球坐标经度λ(相对于参考椭球)、纬度φ和
高程(相对于椭球或地球体)来描述地球表面点P的位置。
由于椭球上的大地计算(例如,两幢建筑物之间的距离)在数值处
理上非常繁琐,测量技术的习惯做法经常是将椭球投影到平面上。这就
产生了位于平面、右旋的X和Y地区坐标。大部分地图都绘有网格,以便
在野外方便地找到某个地点。对于平面地区坐标,可以在计算平面内建
立测量参考椭球的椭球坐标映射(投影)。椭球在平面内的投影无法做
到不变形。但适当选择投影方式使变形量降至最低是可能的。通常的投
影处理有圆柱投影、墨卡托投影、高斯-克吕格投影和UTM投影。如果将
位置信息与地图资料结合使用,还必须注意绘制地图所使用的参考系和
投影方式。
2.4.1 高斯-克吕格投影(横切墨卡托投影)
高斯-克吕格投影是一种等角横切墨卡托投影,只适用于有限的区
域或局部。用一个椭圆形圆柱体包围地球的旋转椭球(如贝赛尔椭
球),圆柱面沿椭球中央子午线(对于需绘图区域的一条重要子午线,例如经度为9°的子午线)的整个经线以及两极与其相接。圆柱体位置
相对于椭球体为横切,例如:旋转90°(见图2-8)。为使经线和面积
变形最小,在旋转椭球上采用经差为3°的区域进行投影。该区域的宽
度沿中央子午线不变。根据地区的不同,采用不同的中央子午线(例如
6°、9°、12°、15°)。图2-8 高斯-克吕格投影
沿南北方向的数值按与赤道的距离计算。为避免沿东西方向出现负
值,允许中央子午线西移500000m(偏移)。中央子午线的经度数可以
被3整除,并取整数部分的值。
例如位置为:
椭球坐标:N:46.86154°E:9.51280°
高斯-克吕格(中央子午线:9°):N-S:5191454 W-E:3539097
该位置距离赤道5191454m,距离中央子午线(9°)39097m。2.4.2 UTM投影
与高斯-克吕格投影相比,UTM(通用横轴墨卡托)坐标系将整个地
球表面投影到60×20=1200个平面上。旋转椭球在横切圆柱体上的实际
投影过程与高斯-克吕格投影相同。
UTM坐标系通常以WGS-84椭球为基础。但它只定义了投影和坐标
系,而未定义参考椭球和大地基准面。
UTM坐标系将全世界划分成经差为6°的区域(见图2-9)。这些区
域从西经180°开始至东经180°结束,依次从1至60进行编号。如果区
域1从西经180°延伸到西经174°,则区域1的中央子午线为西经
177°;如果区域2从西经174°延伸到西经168°,则区域2的中央子午
线为西经171°,依此类推。
图2-9 (60个之中的)某个区域投影原理
各投影区域的中央子午线分别为东经和西经3°、9°、15°、21°、27°、33°、39°、45°、51°、57°、63°、69°、75°、81°、87°、93°、99°、105°、111°、117°、123°、129°、135°、141°、147°、153°、159°、165°、171°、177°(见图2-
10)。图2-10 采用UTM投影的区域划分(带示例)
在南北方向(至极点)上进行分区(除纬度为8°的带状区域
外),从字母C开始标识,但仅适用于北纬84°至南纬80°的区域。南
纬72°至南纬80°被指定为C区,南纬64°至南纬72°为D区,依此类
推。但北纬72°至北纬84°的区域为X区。其经差为12°。
在高斯-克吕格投影中,该点到赤道的距离等于其以千米为单位的
南北方向的数值。为避免在南半球出现负值,赤道的数值被指定为
10000000m。
东西方向的数值为该点与中央子午线之间的距离,中央子午线的数
值(与高斯-克吕格投影一样)被指定为500000m。
UTM坐标与WGS-84坐标的示例分别如下:
WGS-84:N 46.86074° E 9.51173°
UTM:32T 5189816(N-S) 0539006(W-E)2.4.3 瑞士投影系(正形双重投影)
可通过两个步骤将贝塞尔椭球(Bessel ellipsoid)正形投影到平
面上,也就是说能够保持角度不变。首先将椭球正形投影到球体上,然
后再通过斜圆柱投影将球体正形投影到平面上。该过程称为双重投影
(见图2-11)。在椭球上平面内的一个主点(伯尔尼的古观象台)固定
为坐标系原点的投影(偏移:YOst =600000m,XNord =200000m)。
图2-11 双重投影原理
在瑞士的地图上(例如,比例尺为1:25000)有两类不同的坐标信
息:
●投影到平面带有网格的地区坐标(以km表示的X和Y)
●相对于贝塞尔椭球的地理坐标(以(°)、(′)、(″)表示
的经度和纬度)
在发布位置坐标时,来自4颗卫星的信号传输时间必须已知。只有
这样,经过相应的计算和转换,才能以瑞士陆上测量坐标发布位置(见
图2-12)。
图2-12 从卫星到位置2.4.4 全球范围的坐标转换
互联网为在各种坐标系之间转换坐标提供了多种可能性。
2.4.4.1 示例:将WGS-84坐标转换为CH-1903坐
标
(选自《参考系实践》,作者Urs Marti和Dieter Egger,瑞士联
邦地形办公室)
精度在1m以内!
1.经度和纬度转换
需要将WGS-84的经度和纬度数据转换为60′进制。
示例:
(1)纬度值(WGS-84)46°2′38.87″转换后为165758.87″。该
数值用B表示:B=165758.87″
(2)经度值(WGS-84)8°43′49.79″转换后为31429.79″。该
数值用L表示:L=31429.79″
2.计算辅助数值
示例计算结果:Φ=-0.326979
Λ=0.464729
3.横坐标计算(东-西方向)计算:y
y[m]=600072.37+(211455.93×Λ)-(10938.51×Λ×Φ)-
(0.36×Λ×Φ2 )-(44.54×Λ3 )
示例:y=700000.0m
4.纵坐标计算(南-北方向):x
x[m]=200147.07+(308807.95×Φ)+(3745.25×Λ2 )+(76.63×Φ2 )-(194.56×Λ2 ×Φ)+(119.79×Φ3 )
示例:x=100000.0m
5.高程H计算:
H[m]=(HeightWGS-84 -49.55)+(2.73×Λ)+(6.94×Φ)
示例:
HeightWGS-84 =650.60m时转换后的结果为:H=600m2.5 栅格地图地理对位
2.5.1 引言
地理对位是指将栅格地图(源)变换为矢量地图(图像)。在栅格
地图中,各点的位置以像素坐标(X,Y)表示,可存储为各种数据格
式,如.JPG.BMP.GIF或者.PNG。这些地图可通过卫星照片或将地图扫描
成计算机文件来获得。在矢量地图中,各点的位置由地理坐标(X′,Y
′)确定。通过适当的数学变换,可将栅格地图变换为带地理坐标系的
矢量地图(见图2-13)。本节将介绍这一变换过程。
图2-13 使用像素坐标X、Y的栅格地图(左图)和使用地理坐标X′、Y′的矢量地图(右图)2.5.2 变换基础
通过仿射变换几何规则可将栅格地图变换为带坐标系的矢量地图,也称为线性变换。该过程仅适用于对方圆数千米的地图小块区域进行变
换。在坐标变换过程中,源坐标系(X,Y)被变换为其他的坐标系(X
′,Y′)。2.5.3 确定变换坐标
代数表示为(其定义见图2-14):
X′=a・X+b・Y+c
Y′=d・X+e・Y+f
图2-14 源点的定义
矩阵表示为:2.5.4 确定变换参数a,b,c,d,e,f
6个变换参数(a,b,c,d,e,f)必须定义成3个坐标对(定标
点)。为计算这6个参数,必须求解含有6个未知变量的6个方程。确定
变换参数(a,b,c,d,e,f)的公式推导分为3个步骤。
1.图像定标
在地图上选出3个均匀分布的定标点(见图2-15)。确定这些定标
点的源坐标(X,Y)和变换后的坐标(X′,Y′)。
图2-15 3个定标点必须在地图上均匀分布
定标坐标为:
X1 ,Y1 ,X1 ′,Y1 ′
X2 ,Y2 ,X2 ′,Y2 ′
X3 ,Y3 ,X3 ′,Y3 ′
(2-1)
2.建立变换方程
将公式(2-1)重新整理为所有6个变换后的坐标:
X1 ′=a・X1 +b・Y1 +c
Y1 ′=d・X1 +e・Y1 +f
X2 ′=a・X2 +b・Y2 +c
Y2 ′=d・X2 +e・Y2 +fX3 ′=a・X3 +b・Y3 +c
Y3 ′=d・X3 +e・Y3 +f
(2-2)
则方程(2-2)可以用以下矩阵形式表示:
3.确定变换参数a,b,c,d,e,f
向量(a,b,c,d,e,f)是我们需要求解的,可通过对方程(2-
3)进行推导整理得出。2.5.5 示例(将栅格地图变换为WGS-84)
我们将对以下地图(见图2-16)进行地理对位。定标采用了3个参
考点。
图2-16 带有3个定标点[6]
的栅格地图
根据方程(4)确定变换参数:确定位置坐标:
图2-17 确定位置,该点像素坐标为X=643和Y=370
通过以下公式:
X′=a・X+b・Y+c
Y′=d・X+e・Y+f
得出X′和Y′的地理坐标如下:
经度X′=-1.883248°,纬度Y′=42.69659°图2-18 通过Google Earth验证计算出的地理坐标[7]第3章 卫星技术基础
3.1 开普勒定律
卫星在太空中的运动遵循约翰内斯・开普勒(1571―1630)提出的
行星运动定律。开普勒通过观测发现空间天体的运动遵循3个相当简单
的数学定律。
3.1.1 开普勒第一定律
开普勒指出,行星的轨道处在一个平面上,该轨道为椭圆形,太阳
位于其中的一个焦点上。
该定律也同样适用于卫星(也是在太空中轨道上运行的天体)。卫
星也沿平面运转(见图3-1)。它们围绕地球运转的轨道为椭圆形,地
球位于其中的一个焦点上。
图3-1 卫星沿平面运动●远地点是指椭圆轨道上距离地球中心最远的点。从该值中减去地
球半径(约6378km),就得到了卫星距离地球表面的最大高度。
●近地点是指椭圆轨道上距离地球最近的点。从该值中减去地球半
径,就得到了卫星距离地球表面的最小高度。3.1.2 开普勒第二定律
第二定律的表述是:“连接行星和太阳的直线在相等的时间间隔内
扫过的面积相等 [1] 。”这条定律也被称为等面积定律。
对卫星而言,这意味着连接卫星和地球的直线在相等的时间间隔内
扫过的面积相等。因此,如果时间Tv_1和Tv_2相等,则面积A_1和A_2也
相等(见图3-2)。
[1] 《开普勒第二定律》,Jeff Bryant和Oleksandr Pavlyk著,沃尔夫勒姆演示项目。3.1.3 开普勒第三定律
第三定律指出,行星轨道周期的平方与轨道长半轴的立方成正比。
这表明较大的天体轨道较长,而且轨道较长的行星的速度要低于轨道较
短的行星的速度:
对所有的行星都是常数。
其中,P为轨道周期,a为椭圆轨道的长半轴。
由此定律可推导出高出地球表面的卫星轨道高度(h)(见图3-3)
为:
Re :地球半径(6378.137km);
P:卫星环绕地球的轨道周期。
图3-2 开普勒第二定律图解图3-3 确定卫星的轨道高度(h)3.2 卫星轨道
轨道描述了卫星在太空中的位置。用于导航的卫星不停地围绕地球
沿圆形或椭圆形轨道运转。空间定位(如轨道倾角、偏心率、长度、距
地面高度)及运动参数(如轨道周期)对这些卫星的可用性和性能有着
显著影响(见图3-4)。
●倾角是指倾斜的角度或轴倾角,表示围绕地球运转的卫星的圆形
或椭圆形轨道相对于赤道平面的倾斜程度。例如,倾角为90°的轨道将
从极区正上方经过。所有不在赤道平面内的卫星轨道都被称为“倾斜轨
道”。
图3-4 卫星轨道
●卫星的星历是对其轨道的数学描述。接收机需要高精度的卫星轨
道数据,以便在任意给定时间计算卫星在太空中的准确位置。降低了精
度的轨道数据称为年历(见图3-5)。在年历的帮助下,接收机可计算
出在地平线上可见的卫星的大致位置和时间。每颗卫星都发送自己的星
历和所有现有卫星的年历。当前的年历数据也可通过互联网查看 [1] 。图3-5 年历
●仰角描述卫星相对于地平面的角度。如果卫星直接经过观测点上
方,则仰角为90°。如果卫星处在地平线上,则仰角为0°。
●方位角是指参考平面与某个点之间的角度。就卫星而言,参考平
面为地平线所在的、指向正北方向的平面。方位角为卫星与正北方向
(北=0°,东=90°,南=180°,西=270°)的夹角。
图3-6 方位角
●偏心率定义了所谓的数值偏心率“e”,表示椭圆卫星轨道(偏心轨道)相对于几何圆形轨道的偏差。数值偏心率按以下公式确定:
其中,a为椭圆轨道的长半轴,b为短半轴(见图3-1)。对于圆形
轨道,e=0;e越接近1,椭圆的长度(即长半轴)相对于短半轴就拉得
越长。
[1] http:www.navcen.uscg.govgpsalmanacs.htm3.3 轨道高度
轨道高度是圆形或椭圆形卫星轨道上的某一点距地球表面的高程。
最初,商业通信卫星被优先送入圆形赤道(倾角为0°)轨道,高度约
为距地面36000km。在该轨道上的卫星24h绕地球一周(轨道周期:
24h),因此其相对于地球是静止的。因此,这类卫星也被称为地球同
步(GEO)卫星,其轨道被称为地球同步轨道。地球同步卫星被用于
Inmarsat、Thuraya之类的通信卫星系统,以及WAAS、EGNOS之类的SBAS
系统(参见7.5.1节)。
除了轨道高度相对较高、可覆盖地球表面广大地区的地球同步卫
星,其他卫星系统(例如Iridium、Globalstar、GPS和GALILEO)采用
的卫星轨道高度要低得多。这些轨道高度较低的卫星必须提高环绕地球
的速度以提供必要的离心力,用来补偿低高度带来的增大的地心引力。
与地球同步卫星相比,这些卫星在称为非地球同步卫星轨道(NGSO)上
围绕地球运动和旋转。
通常将卫星轨道分为六类:
●地球同步轨道(GEO):与地球同步的轨道,高度约为36000km;
●中地轨道(MEO):中高度(约10000km)倾斜轨道;
●低地轨道(LEO):低高度(不到1000km)轨道;
●高(倾斜)椭圆轨道(HEO);
●倾斜地球同步轨道(IGSO);
●极地轨道(PEO):经过极区的LEO轨道。
示例1:确定地球同步卫星的高度。
地球同步卫星的轨道高度非常精确,可通过计算得出。
地球平均恒星日 [1] 为23h56min4.099s=86164.099s,表示在固定
的恒星系内地球自转360°所需的时长。
根据第3.1.3节中给出的公式:=35786035m=35786.035km
示例2:确定GPS卫星的轨道周期。
GPS卫星采用中等高度的轨道,距地面的高度为20184.5km。GPS卫
星的平均轨道周期可按以下公式确定:
这个时间相当于半个恒星日。由于地球也同样在旋转,因此当GPS
卫星运转两周后将通过地球上空的同一点。
[1] 相对于位置固定的恒星。3.4 无线电频率
基于卫星的导航信息发送以及在不同的系统部分之间通过无线电广
播进行的通信有:
●用户链路:卫星与用户之间(如用户终端);
●馈线链路:卫星与地球上的中心站之间(如地面站、控制站);
●星际链路:太空中的卫星之间(直接通信,无须通过地面站)。
根据发射方向区分:
●上行(上行链路,也称反向链路):从卫星传输站(地面站和
或用户终端)“向上”发送至卫星。例如:用户上行链路,移动用户终
端的发送方向。
●下行(下行链路,也称正向链路):从卫星“向下”发送至卫星
传输站。
卫星发射频率由国际电联(ITU)的国际无线电会议(WRC)负责分
配和管理。表3-1给出了ITU-RV.431-7所规定的用于卫星通信和导航的
典型微波电磁发射频率。3.5 时间系统
时间在基于卫星的定位中扮演了重要角色。GPS可分为5个重要的时
间系统。
3.5.1 国际原子时(TAI)
国际原子时标(国际原子时,TAI)是为了形成统一的“绝对”时
标而建立的,它可同时满足各种用途的不同物理要求。其中的用途之一
是GPS定位,时标在里面起到非常重要的作用。
自1967年起,秒被定义为原子物理常数。非放射性元素铯(133
Cs)被选作基准。铯原子选定能级之间的谐振频率被规定为
9192631770Hz。以此定义的时间成为SI计量系统(国际单位制)的一部
分。原子时的起点被设定为1958年1月1日0时0分。3.5.2 协调世界时(UTC)
引入协调世界时(UTC)是为了提供以原子时为基础可用于地球现
实世界时间的时标。协调世界时以前称为格林尼治标准时间(GMT)或
世界时 [1] 。
协调世界时与国际原子时的差别在于秒的计数上,即UTC=TAI-n,其中n等于所有累加的秒数,可在每年12月31日和6月30日结束时增加
(闰秒)。闰秒因其反映了地球自转变缓趋势而非常必要,并能对时钟
进行修正以保持时间的统一和精确。
[1] http:www.bipm.orgenscientifictaitime_server.html3.5.3 GPS时
通常GPS系统时间被表述为星期数及该星期已消逝的秒数。其起始
日期为1980年1月6日星期日0时0分(UTC)。每个GPS星期开始于星期六
与星期日之间的午夜,此时由主控站的母钟提供连续时标。GPS时与协
调世界时之间的时差被连续处理并包含在导航信息中。GPS时与协调世
界时的区别在于所有累加的秒数(2009年GPS时间与协调世界时相差
15s)以及对秒的划分。GPS控制站保持GPS时的秒标记与协调世界时相
差不超过1μs。GPS时与协调世界时的时差和GPS导航信息(参见4.6
节)在子帧4中一同发送。3.5.4 卫星时
由于GPS卫星所载原子钟固有的和不规则的频率误差,各卫星的时
间会与GPS系统时间存在偏差。控制站对卫星时钟进行监控,并通知任
何观察到的时差。在进行本地GPS测量时应考虑时间偏差。3.5.5 地方时
地方时是指特定地区或区域所使用的时间。地方时与协调世界时的
关系由时区及有关标准和夏令时的规定确定。
表3-2给出了2009年7月9日记录的瑞士地方时示例。
以下时间值在2009年内有效:
●国际原子时-协调世界时=+34s
●GPS时-协调世界时=+15s
●国际原子时-GPS时=+19s第4章 GNSS技术:GPS示例 如果你想了解……
○为何需要三个不同的GPS部分
○每个独立的部分有哪些功能
○GPS卫星的基本组成是什么
○哪些类型的信息被发往地球
○卫星信号是如何生成的
○卫星导航系统信号行程时间是如何确定的
○相关性是指什么
○为何连线GPS需要最小时间周期
○什么是帧和子帧
如果是这样,你应该阅读本章!
4.1 引言
所有的GNSS都采用相同的原理工作。在后面几节我们将通过具体考
察GPS来探讨GNSS的不同技术部分。GPS是GNSS技术的先行者,也是唯一
投入全面运营的全功能GNSS。GPS和GNSS通常可互换使用,尽管GPS具体
指的是由美国国防部发展、美国空军第50航空联队(Air Force 50th
Space Wing)管理的授时与测距导航系统全球定位系统。GPS于1993年
开始全面投入运营 [1] 。[1] http:en.wikipedia.orgwikiGlobal_Positioning_System4.2 全系统描述
GPS由三个功能部分组成(见图4-1):
图4-1 GPS的三个组成部分
●空间部分(所有在轨工作的卫星);
●控制部分(所有与系统监控有关的地面站:主控站、监控站和地
面控制站);
●用户部分(所有民用和军用用户)。
从图4-1可以看出,空间部分与用户部分的通信是单向的。地面控
制站与卫星的通信是双向的。4.3 空间部分
4.3.1 卫星的分布和运动
GPS的空间部分由多达32颗工作卫星(见图4-2)组成,这些卫星在
6个不同的轨道平面上围绕地球运转(每个平面有4~5颗卫星)。这些
卫星的轨道高度距地面20180km,与赤道的夹角为55°。任何一颗卫星
均在12h内绕行一周。由于地球也在运转,卫星会在约24h(准确时间为
23h 56min)后重返其地面上空的出发位置(见图4-3)。
图4-2 GPS卫星在6个轨道平面上绕地球运转
在卫星有效作用范围内的任何位置均可接收到卫星信号。图4-3给
出了一颗位于赤道与零子午线交汇处上空的卫星的有效作用范围(阴影
区)。图4-3 某GPS卫星的24h轨迹及其有效作用范围
特定时间的卫星分布如图4-4所示。由于这种巧妙的分布模式和较
高的轨道高度,确保了在全球任何地点、任何时间至少可与4颗卫星进
行通信。
图4-4 2001年4月14日12时(协调世界时)GPS卫星的位置4.3.2 GPS卫星
4.3.2.1 卫星结构
所有的GPS卫星均使用星载原子钟来保持同步信号,这些信号以相
同的频率(1575.42MHz)发送。地面上接收到的最小信号强度为-158
~-160dBW [1] 。根据规定,最大信号强度约为-153dBW。
图4-5 GPS卫星
[1] 《全球定位系统,标准定位系统服务,信号规范》,第2版,1995年,第18页。
http:www.navcen.uscg.govpubsgpssigspecgpssps1.pdf4.3.2.2 通信链路预算分析
卫星与用户之间的链路预算分析(见表4-1)适用于制定所需的卫
星发射功率标准。根据规定,最小接收功率不得低
于-160dBW(-130dBm)。为确保符合该标准,使用CA码调制后的卫星
L1载波发射功率必须达到21.9W。接收机设计要考虑极化失配和天线接
收增益因素。这两个参数的总和可能会有较大的变化范围。根据设计的
不同,数值通常会在+5~-10dB之间。
根据规定,户外的GPS信号接收功率至少应
为-160dBW(-130dBm)。信号接收的最大谱功率密度应
为-190dBmHz(见图4-6)。热背景噪声下的谱功率密度约
为-174dBmHz(温度为290K)。因此最大信号接收功率约比热背景噪声
水平低16dB。4.3.2.3 卫星信号
卫星以50bits的速率发送以下信息(导航电文) [1] :
●卫星时和同步信号;
●精确轨道数据(星历);
图4-6 信号接收谱功率密度与热噪声
●用于确定精确卫星时的时间修正信息;
●所有卫星的近似轨道数据(年历);
●用于计算信号发送时间的校正信号;
●电离层数据;
●卫星的工作状态(健康状况)信息。
发送完所有上述信息所需的时间为12.5min。通过使用导航电文,接收机能够确定每个卫星信号的发送时间以及在发送时卫星的精确位置。
每颗GPS卫星都会发送为其分配的唯一签名。签名由1023个0和1组
成的伪随机噪声(PRN)码,广播历时1ms并连续重发(见图4-7)。
图4-7 伪随机噪声(PRN)
该签名码供接收机用于以下两方面:
●辨识:通过唯一的签名模式可识别出信号是由哪颗卫星发送的;
●信号行程时间测量。
[1] 《NAVCEN:GPS SPS信号规范》,第2版,1995年,http:www.navcen.uscg.govpubsgpssigspecgpssps1.pdf4.3.3 生成卫星信号
4.3.3.1 简化框图
在每颗卫星上均载有4台高精度原子钟,由其中一台原子钟的共振
频率生成以下工作所需的时间脉冲和频率(见图4-8和图4-9):
●50Hz数据脉冲;
●CA(粗捕获)码(频率为1.023MHz的PRN码广播),该码采用异
或操作(EXOR) [1] 调制数据并以2MHz带宽发送数据;
图4-8 简化的卫星框图图4-9 GPS信号的数据结构
●民用L1载波频率(1575.42MHz)。
由CA码调制的数据通过二进制相移键控(BPSK) [2] 依次对L1载
波进行调制。只要调制数据改变,L1载波相位就会改变180°。
[1] 一种对两个操作数的逻辑运算,如果操作数中有且只有一个操作数的值为真时,逻辑运算
值为真。
[2] 一种调制载波的方法,可将数据转换为0°180°载波相移。4.3.3.2 详细框图
卫星导航信号是通过一种称为DSSS(直接序列扩频)调制 [1] 过程
生成的。在该过程中,基准频率(不要与接收机的基带芯片混淆)以较
宽的带宽叠加到较高的频率信号上发射。扩频调制原理于20世纪40年代
由电影明星Hedy Lamarr和钢琴家George Anthell [2] 首先在美国提
出。即便在不利的环境下该过程仍能实现安全的无线电链路。
每颗GPS卫星都载有4台非常稳定的原子钟(稳定性优于20×10-12) [3] ,由其中一台原子钟的共振频率产生10.23MHz的基准频率。载波
频率、数据脉冲频率和CA(粗捕获)码依次由此频率生成(见图4-
10)。由于所有的GPS卫星均以1575.42MHz发送信号,因而采用了一种
称为CDMA(码分多址)的多路传输 [4] 处理。
图4-10 GPS卫星详细框图
CA码在多路传输和调制中扮演了重要角色。它是一个不断重复的
1023比特序列,被称为伪随机噪声(PRN)码。每颗卫星的PRN码都是唯
一的,并用作其辨识信号。CA码是通过反馈移位寄存器生成的 [5] 。
发生器带有一个频率为1.023MHz、周期为1023码片 [6] (相当于
1ms)。CA码是黄金码(Gold Code) [7] ,具有优良的校正特性。这对于后面位置计算中的导航处理有着重要影响。
[1] Lemme H.,《在一个芯片上实现快速的扩频调制》,Elektronik,1996年,H.15,第38至
45页。
[2] http:www.maxim-ic.comappnotes.cfmappnote_number1890
[3] Parkinson B.,Spilker J.,《全球定位系统》,第1卷,AIAA-Inc.
[4] 一种通过对每个用户使用不同的伪随机码序列将无线电信道划分为多通道的形式。由于调
制的编码信号具有比需通信的数据高得多的带宽,因此CDMA是一种“扩频”信号传输。
[5] 一种移位寄存器,输入比特是其此前状态的线性函数。
[6] 伪随机数列中的位的变换时间。
[7] 黄金码是指一种二进制序列,可由两个长度同为n的m序列得到。一组黄金码可通过改变这
两个m序列的相移来生成。黄金码的编码具有三值互相关函数的特点。4.4 控制部分
GPS卫星控制部分(操作控制系统,OCS)由位于科罗拉多州的主控
站、5个监控站(每个站均配备原子钟并分布在全球赤道附近)和3个向
卫星发送信息的地面控制站组成。
控制部分最重要的任务有:
●观测卫星运动并计算轨道数据(星历);
●监视卫星时钟并预测其运行情况;
●对星上时间进行同步;
●转发收自卫星的精确轨道数据;
●转发所有卫星的近似轨道数据(年历);
●转发其他信息,其中包括卫星健康状况、时钟误差等。
4.4.1 失效可能性与人为信号失真(SA)
控制部分还负责监视人为信号失真(选择可用性,SA),以降低供
民用使用时的系统定位精度。在2000年5月之前,美国国防部(GPS运营
者)出于政治和战略考虑故意降低系统精度。其中包括使用随机误差信
号调制部分卫星的时间信号,或者伪造星历。2000年5月初,SA系统失
效 [1] ,为此定位精度从100m左右猛然提高到13m(改善幅度达95%)
[2] ,见图4-11和图4-12。图4-11 2000年5月2日SA系统失效后,定位精度得以提高
图4-12 定位精度的提高表现为时间的函数
在2000年5月2日之后,只在必要时才激活地区性或全球性人为失真
(SA) [3] 。这一原则既保留了在特定重点地区降级或限制GPS使用的
可能性,又使在这些地区以外的系统精度不受限制。实际上还未曾听说
有重新激活SA系统的事例。美国国防部于2007年9月18日宣布,下一代GPS卫星(GPSⅢ)的卫
星导航信号将不再做人工失真处理 [4] 。这一代卫星也不再考虑信号失
真的技术可行性。由于美国政府未向GPSⅢ卫星加入信号失真功能,并
克制实行现有的SA措施,这将确保GPS对于民用用户的可靠性。
[1] http:www.ngs.noaa.govFGCSinfosans_SAdocsstatement.html
[2] http:pnt.govpublicsadiagram.shtml
[3] http:pnt.govpublicsasa.shtml
[4] http:www.defenselink.milreleasesrelease.aspx?
releaseid=11335,http:insidegnss.comnode2004.5 用户部分
GPS卫星发送的无线电信号到达地面上的接收机约需67ms。由于信
号以恒定速度(光速C)行进,其行程时间可确定卫星与用户之间的准
确距离。但光速是媒介的函数,后文对此将详加探讨。
接收机会收到4个不同的信号,这些信号来自4颗卫星,每个信号都
具有相同的结构。使接收机生成的信号与收自卫星的信号同步,将测得
的4颗卫星的信号时间偏移Δt作为时标(见图4-13)。然后将测得的所
有4颗卫星信号的时间偏移Δt用来确定精确的信号行程时间。这些时间
偏移乘以光速得到的距离称为伪距。
图4-13 测量信号行程时间
为确定用户的位置,需要与4颗卫星进行无线电通信。与这些卫星
之间的距离通过信号的行程时间确定。然后接收机根据伪距和这4颗卫
星的已知位置计算出用户的经度λ、纬度φ、高程h和时间t。如果换成
数学语言,就是通过这4颗卫星的距离和已知位置确定4个未知变量φ、λ、h和t,但这需要相当复杂的迭代,后文将详述这一过程。
上文提到,所有的GPS卫星以相同的频率发送信号,但使用不同的
CA码。通过相关性来进行卫星辨识和信号恢复。由于接收机能够识别
所有目前使用的CA码,通过将所有已知编码与所有接收到的卫星信号
进行系统的移位和比较,最终会找到完全匹配者(也就是说,相关因子
CF为1),并得到相关点(见图4-14)。相关点用于测量实际的信号行程时间以及辨识卫星。
图4-14 30位校准处理的图示说明
这里用CF(相关因子)来表示相关质量。CF的范围在±1之间,仅
当信号完全匹配(位顺序和相位)时为+1。
式中:mB――所有匹配的位的数量;
uB――所有不匹配的位的数量;
N――观测到的位的数量。
由于多普勒效应(卫星和接收机处于相对运动状态)的影响,发送
的信号在接收点的频移可能会达到±5000Hz。因此,信号行程时间的确
定和数据恢复不仅要与所有可能相移的所有编码相关,还要辨识正确的
相位载波频率。此外,本地基准频率可能也有偏差,这就加大了需要搜
索的频率宽度。本地振荡器1ppm的频率误差相当于1.575kHz的多普勒频
移。图4-15表示多普勒频移在±6kHz范围内时的本地振荡器偏差情况。
通过将所有编码(见图4-14)和载波频率与收到的卫星信号进行系统的移位和比较,就会找到一个完全吻合的点(即相关因子为1)(见图4-
15)。
收到的GPS信号功率谱密度约比热噪声或背景噪声的功率谱密度低
16dB(见图4-6)。对收到的GPS信号进行解调和解扩导致的系统增益GG
为:
解扩后,可用信号的功率密度要高于热噪声或背景信号噪声(图4-
16)。
通过增加相关时间(停留时间)可提高GPS接收机的灵敏度。相关
器在编码-频率域的指定点停留的时间越长,在天线位置所需的GPS信号
强度就越低。如果相关时间以系数k增长,则信号与热背景噪声之差会
提高GR :
GR =log10 (k)
图4-15 在编码和载波频率域内搜索最大相关点图4-16 相关信号和热信号噪声的谱功率密度
如果停留时间加倍,则信号与热背景噪声(接收机灵敏度)之差会
增加3dB。在实际使用中,将相关时间延至20ms并非难事。如果发送数
据的值已知,可以将该时间进一步延长。4.6 GPS导航电文
4.6.1 引言
GPS导航电文 [1] 是以50bits发送的连续数据流。每颗卫星都向地
球转发以下信息:
●系统时间和时钟修正值;
●卫星自身的高精度轨道数据(星历);
●所有其他卫星的近似轨道数据(年历);
●系统健康状况等。
导航电文对于计算卫星的当前位置以及确定信号行程时间是必不可
少的。
数据流被调制成各卫星的HF载波。数据按照称为帧或页的逻辑分组
单元发送。各帧的长度为1500bits,发送需要花费30s。一帧又被分为5
个子帧。各子帧的长度为300bits,发送需要花费6s。发送一个完整的
年历需要25个不同的帧。因此整个年历的发送时间为12.5min。除非配
有GPS增强器(参见第7章),否则GPS接收机必须收集到至少一个完整
的年历才能计算初始位置。
[1] 《GPS标准定位服务信号规范》,第2版,1995年6月2日。4.6.2 导航电文的结构
一帧的长度为1500bits,发送需要花费30s。这1500bits的信息被
分为5个子帧,每个子帧300bits(发送需花费6s)。每个子帧由10个字
(word)组成,每个字含30bits。子帧以一个遥测字(TLM)和一个转
换字(HOW)开头。一个完整的导航电文由25帧(页)组成。图4-17给
出了导航电文结构的图示。
图4-17 整个导航电文的结构4.6.3 子帧包含的信息
每一帧被分为5个子帧,每个子帧用于传送不同的信息。
●子帧1包含了发送信号的卫星的时间值,其中包括用于修正信号
传输延迟和星载时钟时间的参数,以及卫星健康状况信息和卫星位置精
度的估算值。子帧1还用于提供传送10bits GPS星期数(10bits可表示
从0至1023的数值)。GPS时始于1980年1月6日星期日0时0分0秒。每经
过1024个星期后,星期数重新从0开始。该事件称为“星期归零”。
●子帧2和3包含了发送信号的卫星的星历数据。这些数据提供了非
常精确的卫星轨道信息。
●子帧4包含了编号为25~32的卫星的年历数据(注意:每个子帧
只能用于发送一颗卫星的数据)、GPS时与协调世界时之间的差异
(即:闰秒或UTC偏差)以及与电离层导致的测量误差有关的信息。
●子帧5包含了编号为1~24的卫星的星历数据(注意:每个子帧只
能用于发送一颗卫星的数据)。所有的25页信息与编号为1~24的卫星
的健康状况信息一同发送。4.6.4 遥测字(TLM)与转换字(HOW)
每个单帧的首字是遥测字(TLM),它包含了一个8bits长的前置序
列(10001011)用于同步,接下来是为授权用户保留的16bits。与所有
的字一样,遥测字的最后6bits为奇偶校验位。
转换字(HOW)紧跟在每个子帧的遥测字后面。转换字长度为
17bits(17bits可表示从0至131071的数值),其中包含了下一子帧的
起始时间,以星期时(TOW)发送。星期时从GPS星期的起点数值0开始
(过渡期为星期六23时59分59秒至星期日0时0分0秒),并且该数值每
6s加1,由于每周有604800s,计数在归零之前从0累加至100799。每隔
6s将一个标志加入到数据流中与转换字一同发送,以便与P码同步。第
20~第22bit用于转换字,以标识刚发送完的子帧。4.6.5 25页的细分
完整的导航电文需要25页,发送至少需要12.5min。一页或一帧分
为5个子帧。所有25页的子帧1~3的信息内容均相同。这意味着接收机
每30s就能获得发送卫星的完整时钟值和星历数据。
子帧4与子帧5之间的差异仅在于发送信息的组织方式。
●对于子帧4,第2、3、4、5、7、8、9和10页转发编号为25~32的
卫星的年历数据。在所有情况下,每页只用来传送一颗卫星的年历数
据。第18页用来传送对电离层闪烁的修正测量值,以及协调世界时与
GPS时之间的差异。第25页包含了所有32颗卫星的配置信息(即分区关
系)以及编号为25~32的卫星的健康状况。
●对于子帧5,第1至第24页转发编号为1~24的卫星的年历数据。
在所有情况下,每页只用来传送一颗卫星的年历数据。第25页用来传输
编号为1~24的卫星的健康状况信息以及初始年历时间。4.6.6 星历与年历数据比较
借助星历和年历数据,就可以通过给定的时间点来确定指定卫星的
卫星轨道和相关坐标。发送的星历和年历数据差别在于数字的精度。表
4-2对这两组数字进行了比较。
卫星的轨道属椭圆形。图4-18对表4-2中使用的术语给出了图示。
轨道长半轴:a
轨道短半轴:b
椭圆轨道偏心率:e=4.7 GPS现代化
4.7.1 新调制方法,BOC和MBOC
图4-18 星历术语
4.7.1.1 BPSK(1)―调制
为使所有的卫星都能在相同的频率上传输,GPS信号采用特殊的编
码方式。民用标准定位系统(SPS)信号采用由1023个0和1组成的伪随
机噪声码(PRN)编码,称为CA码。该码的周期为1ms,码片速率为
1.023Mbits。它被连续重复发送,由于其唯一的结构使得接收机能够
辨识出哪颗卫星是信号的来源。
数据信号的扩频(或调制)通过异或操作(EXOR)来完成(见图4-
19),因而被称为二进制相移键控(BPSK(1))。基准频率信号由4个
原子钟之中的一个生成,所有的卫星信号都由此衍生。基准频率随后通
过CA码按1×1.023Mbits扩频或调制。图4-19 进行BPSK调制时,导航数据信号首先通过编码进行扩频
BPSK(1)信号的谱功率密度(PSD),如图4-20所示。
图4-20 BPSK(1)信号的谱功率密度(信号强度按每信号1W规范化)4.7.1.2 BOC―调制简介
将来GPS和欧洲GALILEO系统的基本调制都将采用称为二进制偏移编
码调制(BOC)的新调制方法。通过BOC对BPSK信号做进一步调制 [1] 。
调制频率通常为基频频率1.023MHz的倍数。该调制具有可通过特定方式
进行通信的特性。例如,BOC(10,5)表示调制频率是本频或基频频率
的10倍(10×1.023MHz),CA码码片速率是基频的5倍
(5×1.023Mbits)(见图4-21)。
图4-21 BOC(10,5)调制器框图
采用BOC可以使信号在带宽内更好地分布,并且反向信号反射(多
径效应)对导航信号接收的影响也较BPSK有所降低。BPSK(1)和
BOC(1,1)同时使用时相互间影响甚微,这是因为它们的最大功率谱
密度是分开的(见图4-22)。图4-22 采用BPSK(1)和BOC(1,1)时,信号最大值是分开的(信号强度按每信号1W规范
化)
[1] 《导航学会》杂志,2002年,第48卷,第4期,第227~第246页,作者:John W.Betz4.7.1.3 MBOC调制(多路BOC,MBOC(6,1,111))
2007年7月26日,美国和欧盟达成协议,GPS和GALILEO将采用相同
的调制方法。这种被称为MBOC(6,1,111)的新调制方式将用于新一
代GPS的L1C(L1民用)信号和GALILEO的L1OS(L1开放服务,有时也称
为E1)信号。MBOC调制是对BOC调制的扩展,组合了两个BOC调制器并以
不同的权重对其信号进行叠加(见图4-23)。
MBOC(6,1,111)= ・BOC(1,1)+ ・BOC(6,1)
图4-23 用于L1C和L1OS的MBOC(6,1,111)调制器
通过组合两个BOC的信号,可在较高的频率获得更好的性能(见图
4-24)。由此改善了跟踪性能,并使接收机对噪声、干扰和多径效应的
敏感性降低。为能充分利用这些特性,接收机带宽必须达到约
20MHz(BPSK(1)约为2MHz)。图4-24 MBOC(6,1,111)与BPSK(1)的谱功率密度比较(P=1W每信号)4.7.2 GPS现代化
自1978年GPS投入使用以来,所有的卫星都向地面发送以下三种信
号:
●在L1频率(1575.42MHz)上:一路民用信号(使用CA信号、BPSK(1)调制的SPS服务),一路军用信号(使用P(Y)信号、BPSK(10)调制的PPS服务);
●在L2频率(1227.60MHz)上:第二路军用P(Y)信号。
美国国防部计划逐步改进GPS信号结构(见图4-26)。对于民用而
言,引入第二个和第三个频率是非常重要的,如果在定位时可以使用更
多的频率,就能补偿甚至消除电离层对信号行程时间的影响。由于在电
离层中的传输速度C [1] 取决于频率,因此实现这种补偿是可能的。除
了两路新信号,GPS现代化还增强了民用用户的信号强度并提高了军事
应用能力。
GPS运营者为GPS现代化制定的时间表 [2] 如下:
到2009年底,将8颗ⅡR-M型(Block2,补充型和军用型)新卫星送
入轨道。ⅡR-M卫星发送的额外信号有:
●一路新的民用信号,频率为1227.60MHz,即L2C信号;
●新增的军用信号,频率为1575.42MHz和1227.60MHz:即M信号。
这些M信号采用BOC(10,5)调制。
2009年底之后,将24颗GPS ⅡF型(Block2,改进型)卫星送入轨
道(见图4-25,左图 [3] )。这些卫星最重要的特点是:
ⅡF卫星以1176.45MHz(L5频率)的频率发送新的民用信号。该信
号要比以前的民用信号更稳定,可用于要求严格的航空应用。
2013年之后计划采用新一代卫星。新系列定名为GPSⅢ(Block3)
(见图4-25,右图 [4] )。这些卫星最重要的特点是:
●部署聚能波束天线以提高M信号(相当于M+)的信号强度;●对民用L1频率的CA信号结构进行改进,这种新信号将定名为L1
C;
●信号传输的完整性;
●搜索和救援能力;
●未内置实施人为降低性能的功能(选择可用性,即SA)。
图4-25 GPS ⅡF卫星(左图)和GPS Ⅲ卫星(右图)
GPS地面站也将更新。整个系统改造将于2021年完成并投入运营。
届时用户可以使用新信号。图4-26 经过现代化可用的GPS频率将增加
[1] 约为300000000ms。
[2] Ray Clore,《GPS星座更新》,TimeNav.07导航系统现状,日内瓦,2007年。
[3] http:www.boeing.comdefensespacespacegpsindex.html
[4] http:www.aero.orgpublicationscrosslinksummer200207.html第5章 GLONASS、GALILEO和北斗
系统 您是否想了解……
○俄罗斯导航系统GLONASS的工作原理
○为何要建立GLONASS
○欧洲将要启动哪个系统
○为何GALILEO将提供不同的服务
○SAR对海员意味着什么
○新式调制处理BOC的工作原理
○中国计划的此类系统的情况
如果是这样,你应该阅读本章!
5.1 引言
2005年12月28日,首颗GALILEO卫星被送入轨道。到2014年,可能
会出现3个独立的GNSS。GPS、GLONASS和GALILEO。GPS近期将进行改进
因而会更加可靠(参见4.7节)。本章综述了现有的GLONASS、未来欧盟
的GALILEO以及中国计划的GNSS:北斗系统。5.2 GLONASS:俄罗斯系统
GLONASS是目前由俄罗斯国防部运营的GNSS的缩写。GLONASS这一名
称取自Global Navigation Satellite System。该计划最初由苏联发
起,目前由俄罗斯管理。先期的3颗试验卫星于1982年10月12日送入轨
道。
GLONASS最重要的信息有:
●计划总共24颗卫星(21颗标准卫星+3颗备用卫星)。但这个数字
从未达到。2008年初共有14颗卫星在轨运行(见表5-1 [1] )。单个卫
星只有相对较短的3~4年寿命,因而影响了系统的完整性。●3个轨道面(见图5-1 [2] )与赤道的夹角为64.8°(这是所有
GNSS中角度最大的,能够在极区更好地接收信号)。图5-1 GLONASS的三个轨道面
●轨道高度为19100km,轨道周期为11h15.8min。
●每颗GLONASS卫星以两个频率发送两种编码(CA码和P码)。每
颗卫星发送同样的编码,但采用1602MHz(L1波段)和1246MHz(L2波
段)附近的不同频率。这些频率可通过以下公式确定(k为所考虑的卫
星频道):
□在L1波段的频率:f1 =1602MHz+k×(916)MHz
□在L2波段的频率:f2 =1246MHz+k×(716)MHz
5.2.1 GLONASS的建成
完全部署GLONASS需要24颗工作卫星。俄罗斯计划让该系统全面运
营。用质子号(Proton-K DM-2)定期将3颗GLONASS-M卫星(Uragan卫
星)发射入轨(见图5-2 [3] )。M系列的寿命为7~8年,可发送2路民
用信号。
2009年之后将发射GLONASS-K系列卫星。这些卫星的寿命有望达到
10~12年,可发送三路民用信号。所需的24颗卫星到20092010年应全部在轨运行(见图5-3 [4] )。
图5-2 GLONASS-M卫星与质子号(Proton-K-DM2)火箭发射
图5-3 GLONASS发展计划GLONASS的测量定位精度将逐步接近GPS的水平(见图5-4 [5] )。
随着GLONASS的现代化和部署,该系统预计将会有以下变化:
●控制部分更新。
图5-4 待发展计划完成后,测量定位精度应相当于GPS的水平
●时间基准原理现代化。
●星历和卫星时间的测量和发送更加精确。
●卫星时钟的稳定性提高。
●使用的参考椭球(大地参考框架PZ-90)将接近国际地球参考框
架(ITRF)。
●GLONASS-K卫星将引入第三路民用信号(L3)。
●GLONASS-K将加入搜索和营救功能。
●考虑以后在L1频段发送CDMA信号。
[1] http:www.glonass-ianc.rsa.ruplshtmldbf?p=202:20:2776707736388438778::NO
[2] Sergey Revnivykh,第46届CGSIC会议,美国得克萨斯州沃斯堡市,2006年9月26日。
[3] http:www.nasa.govmultimediaimagegalleryindex.html
[4] Sergey Revnivykh,慕尼黑卫星导航峰会,2006年2月21~23日。
[5] Sergey V.Averin,欧盟导航会议GNSS-20065.3 GALILEO
5.3.1 概述
GALILEO是欧盟(EU)与欧洲空间局(ESA)紧密合作研发的欧洲
GNSS。GALILEO由30颗卫星组成,这些卫星处在3个圆形轨道上,距地面
的高度为23222km [1] 。一个遍布全球的地面站网络对卫星提供支持。
从欧盟的角度看,引入GALILEO的主要原因有:
●摆脱对美国的依赖。
●拥有一个精确的导航系统。开放服务(OS)提供的精度有望达到
4~15m。关键安全服务的精度应为4~6m。多径接收敏感度也将下降。
通过采用BOC和MBOC调制实现这一改进。GPS在进行现代化时也将采用
BOC和MBOC调制。
●拥有一个纯民用的导航系统。GALILEO按民用标准设计和实施。
GALI-LEO将为一些服务提供工作保障。
●提供更多的服务。GALILEO将提供5种不同的功能。
●提供搜索与救援功能。其他组织已经提供了搜索和救援(SAR)
功能。GALILEO在此方面的创新是对警报进行应答。
●通过完整性电文提升安全性。GALILEO采用完整性电文,因而更
加可靠。这样就可以立刻通知用户已出现差错,由此保证了可用性。对
于开放服务,既没有可用性保障,也没有完整性电文。这些服务只能通过EGNOS [2] 获得。
●创造就业机会。
●获得GNSS的技术要诀。欧盟计划通过GALILEO来获得专业知识,同时为国内产业提供可持续增强的竞争力。例如,GALILEO使用的原子
钟将在欧洲制造(见图5-5 [3] )。
图5-5 铷与氢微波激射器原子钟
改善卫星信号的全球覆盖率。GALILEO将为高纬度城市提供比GPS更
好的接收性能,这是由于GALILEO卫星的轨道与赤道的夹角为56°并且
高度为23616km。此外,现代的GNSS接收机能够同时处理GPS和GALILEO
信号。这就使可看到并能收到信号的卫星数量倍增,提高了覆盖率和精
度等级。
[1] http:www.esa.intesaNASEMJQSXEM4E_galileo_0.html
[2] 欧洲地球同步导航重叠服务。
[3] http:www.esa.intesaNASEM51URMD6E_galileo_0.html5.3.2 计划中的GALILEO服务
对于某些关键应用,GALILEO将提供有关系统完整性的信息以确保
定位精度。完整性可理解为所提供信息和数据的可靠性。当系统精度低
于设定的最小值时,用户可迅速(不超过6s)收到报警。GALILEO的运
营者认为,这些警告的及时性有时足以应付某些关键应用(如飞机着
陆)。各种服务都对功能、精度、可用性、完整性和其他参数提出了不
同的要求。
5.3.2.1 开放服务,OS
开放服务(OS)针对的是预期的大众市场应用。它能为定位和授时
提供免费信号,对精度要求不高的应用可使用相对廉价的单频率接收
机。由于GALILEO和GPS(L1)对这些应用使用了相同的发射频率,导航
接收机将能够结合使用这两种信号。由于可收到的卫星信号数量增加,即使在不利的条件下接收性能也会有所改善(如在城市环境里)。开放
服务不提供系统完整性信息,GALILEO运营者既不保障可用性,也不为
此承担责任。5.3.2.2 商业服务,CS
商业服务(CS)用于比开放服务性能要求更高的市场应用。商业服
务在使用收费的基础上提供各种为客户带来效益的服务。这些应用中的
典型例子包括:提供高速数据发送服务、可用性保障、与精确授时有关
的服务,以及用于提高位置精度的本地修正信号。5.3.2.3 人身安全服务,SoL
人身安全服务(SoL)主要用于交通方面,对于这一类应用,当导
航系统出现故障时,如果没有及时预警可能会危及生命。它与开放服务
的主要区别在于,人身安全服务可在全球范围为关键应用(如航海、航
空和铁路交通)提供高等级的信息完整性。只有经过认证的双频接收机
才能使用该服务。为实现必要的信号保护,人身安全服务在部署时使用
航空信道(L1和E5)。5.3.2.4 公共管制服务,PRS
GALILEO虽是民用系统,但也能为政府(包括军队)提供稳定和访
问受保护的服务。公共管制服务(PRS)可供警察、消防和边境巡逻队
之类的客户使用。对该类服务的访问受到民事部门的限制和控制。公共
管制服务必须能够在各种条件下连续地使用,尤其是在其他服务可能中
断的关键情况下。公共管制服务与其他服务独立,并具有高等级的信号
稳定特性。公共管制服务还能防范电磁干扰和电磁欺诈。5.3.2.5 搜索和救援,SAR
搜索和救援服务将用于人道主义搜索和救援工作。应急发射机和卫
星能定位飞行、陆上和海洋紧急事件中的个人、船只和车辆。20世纪70
年代末,美国、加拿大、苏联和法国开发了一个卫星系统用来定位被激
活的遇险信标。该系统被称为SARSAT(搜救卫星救助跟踪系统,Search
And Rescue Satellite-Aided Track-ing),俄罗斯将该系统称
为“COSPAS”。COSPAS-SARSAT系统采用6颗LEO(低地轨道)卫星和5颗
GEO(地球同步轨道)卫星。GALILEO搜索和救援服务计划在以下方面对
现有的COSPAS-SARSAT [1] 系统进行扩展和改进:
●几乎能即时接收来自全球的紧急呼叫(目前平均有1h的延迟)。
●准确测定遇险信标的位置(精度为数米而不是目前的5km)。
●通过使用更多的卫星提高了空间部分的效率,能克服不利条件下
的局部盲区(30颗中轨道GALILEO卫星对现有COSPAS-SARSAT系统的低地
轨道卫星和地球同步卫星是一个补充)。
图5-6 与COSPAS-SARSAT不同,GALILEO的搜索和救援服务还提供对遇险信标的应答
GALILEO将加入一种新的搜索和救援功能,可启动对遇险信标应答
(由搜索和救援操作人员回复应急发射机电台)。这将简化救援措施并减少误报的数量。GALILEO的搜索和救援服务定位为与COSPAS-SARSAT协
同工作,由IMO(国际海事组织)和ICAO(国际民航组织)负责管理该
服务的特性和功能。
[1] http:www.cospas-sarsat.orgStatusspaceSegmentStatus.htm5.3.3 精度
根据服务的不同,GALILEO提供不同等级的精度 [1] 。如果使用双
频接收机,通过补偿电离层环境造成的信号行程时间误差可改善精度。
通过使用当地测量数据(如DGPS),可将精度提高至厘米级。表5-2给
出了各种测量服务期望值为95%时的精度。
[1] http:www.gsa.europa.eugocommunications-centerpublications5.3.4 GALILEO技术
GALILEO的空间部分由30颗卫星组成(其中3颗为备用卫星)。这些
卫星被送入高度为23616km的圆形轨道以提供全球覆盖。卫星(每颗重
680kg、尺寸为2.7m×1.2m×1.1m)均布在3个轨道上,与赤道的夹角为
56°(见图5-7),轨道周期为14h5min。
GALILEO卫星预计质量为700kg,尺寸为2.7m×1.2m×1.1m,设计工
作寿命为15年。大面积太阳能电池板提供所需的1500W电力。为使导航
数据保持最新,卫星将每隔100min定期通过无线电与系统的地面部分联
系。
系统的地面部分由2个控制中心以及一个用于各种任务的全球台站
网络组成。其中包括对信号完整性以及大范围预测搜索和救援服务协调
的监视。
图5-7 GALILEO卫星的星座图(供图:ESA-J.Huart)图5-8 GALILEO卫星(供图:ESA-J.Huart)
计划建立全球范围的控制中心以便进行导航和卫星控制。地面部分
的核心由德国和意大利的两个GALILEO控制中心组成 [1] 。主控制中心
为位于Oberpfaffen-hofen的德国航空航天(DLR)中心。计划由该中心
负责30颗卫星为期至少20年的正常运营的控制。第二个担负其正常运营
特定职责的综合控制中心位于意大利Fucino,它也是主控制中心一旦可
能发生任何故障时的一个备份。30颗卫星的定位控制工作由位于德国
Darmstadt的欧洲卫星控制中心(ESAESOC)和法国Toulouse的法国空
间研究中心(CNES)平分,分布在世界各地的约30个综合监测站
(IMS)将控制卫星信号的完整性。两个控制中心将对综合监测站的信
息进行评估,并在位置数据偏差过大时发出警报。
计划通过3枚阿里安5号火箭(每枚携带8颗卫星,见图5-9)、3枚
联盟火箭(每枚携带两颗GALILEO卫星)将这些卫星送入中地球轨道
(MEO)。图5-9 阿里安5号火箭将8颗GALILEO卫星送入太空(GALILEO-industries.net)
5.3.4.1 信号频率
根据服务的不同,使用的频率、调制模式和数据传输率也有所不同
(见表5-3和图5-10 [2] [3] )。主要的调制模式将为BPSK和BOC。作为
例外,E5a和E5b采用一种略加改进、称为AltBOC的BOC调制版本。图5-10 GALILEO服务的频率及保留带宽
此外,E5a、E5b、E6和L1还以导频信道发送。导频信道提供免费的
导航数据,其相位相对其他信号移相90°,这样就缩短了接收机的捕获
时间。在L1与E6之间为搜索和救援一下行链路频率。
[1] http:www.esa.intesaCPSEMT498A9HE_Austria_0.html
[2] http:www.esa.intesaNASEM86CSMD6E_galileo_0.html
[3] 《MBOC调制》,G.W.Hein et al.,《InsideGNSS》,2007年910月,第43页。5.3.4.2 时间计划
2004年6月26日,经过多年艰难的谈判,美国和欧盟在都柏林签署
了一项协议。该协议旨在确保GALILEO与其美国伙伴GPS之间的无缝协作
(互操作性)和兼容性。
图5-11 计划的GALILEO频率
2004年12月10日,根据欧洲委员会的建议,欧洲理事会确认了系统
的技术特性以明确需要提供的服务。2007年7月26日,就L1波段公共民
用信号的开放达成一致。根据欧洲委员会的要求,GPS L1C和GALILEO
L1F信号将采用MBOC(6,1,111)调制,GALILEO将于20132014年投
入运营。
整个系统的建设将分为4个阶段:
●项目定义:定义阶段的目标是制定系统的基本参数和规格。整个
项目的这一部分已于2003年完成。
●在轨开发和试验:2005年12月28日,从俄罗斯哈萨克斯坦拜科努
尔航天发射场将首颗试验卫星GIOVE-A送入轨道(见图5-12)。GIOVE是
GALI-LEO In-Orbit Validation Element(伽利略在轨验证元素)的缩
写,也是木星的意大利语。第二颗试验卫星GIOVE-B于2008年4月27日成功发射入轨 [1] ,第三颗GIOVE-A2也在这一年发射。欧盟通过这些试验
卫星冻结了GALILEO的工作频带并确定了测试阶段卫星的轨道。这些先
驱卫星还用来在太空严酷的环境下试验原子钟之类的重要技术。GIOVE-
A载有两台铷原子钟(稳定性为每天误差约10ns),GIOVE-B载有两台被
动氢微波激射器原子钟(稳定性为每天误差不超过1ns)。
●实施和启动整个系统:如果前两个阶段收效良好,随后将为全面
运营而着手构建系统。剩余的卫星将于20132014年出厂并送入轨道。
图5-12 GIOVE-A卫星及2005年12月28日发射时的情形(ESA供图)
●运营:一旦所有的卫星都进入轨道,系统就可以投入运营。在建
设阶段后期,轨道上应有27颗工作卫星、3颗备用卫星。地面站以及本
地和区域服务站也应建成。
[1] http:www.giove.esa.int5.3.5 GNSS最重要的三个特性
表5-4列出了三个现有(或计划中的)GNSS最重要的特性。5.4 中国的北斗1代和北斗2代系统
5.4.1 目前的系统:北斗1代
2000~2007年间,中国发射了4颗地球同步卫星用于区域性北斗系
统。这些卫星(北斗-1A至北斗-1D)在中国上空发送信号。在卫星与导
航接收机之间通过交互方式定位。信号的发送和接受采用迭代的方式:
●导航接收机向4颗地球同步卫星发送信号。
●所有4颗卫星都收到该信号。
●所有4颗卫星将接收到信号的准确时间发送给地面站。
●地面站计算接收机的经度和纬度并确定其高程。
●地面站将位置信息发送给地球同步卫星。
●地球同步卫星将位置信息发送给导航接收机。5.4.2 未来的系统:北斗2代
中国计划中的全球卫星导航系统目前称为北斗2代,英文缩写为
CNSS(Compass Navigation Satellite System,即北斗导航卫星系
统)。计划中的系统由5颗地球同步卫星和30颗中轨道卫星组成 [1] 。
地球同步卫星按类似SBAS的方式对整个系统进行扩展。北斗系统将提供
两种导航服务:
●开放服务:位置精度为10m,速度精度为0.2ms,时间精度为
50ns。
●授权用户服务:该服务将比开放服务更加可靠。
中轨道卫星将分布在6个轨道上。这些卫星中的首颗已于2007年4月
发射入轨(见图5-13)。计划2020年前后,建成覆盖全球的北斗卫星导
航系统。图5-13 首颗北斗轨道卫星于2007年4月由长征3号甲火箭发射升空
[1] http:www.china.org.cnenglishMATERIAL188713.htm第6章 计算位置 如果你想了解……
○如何确定坐标和时间
○什么是伪距
○为何GNSS接收机在计算开始前必须进行一次位置估算
○如何使用4个未知变量求解非线性方程
○GPS运营者声称的精度如何
如果是这样,你应该阅读本章!
6.1 引言
GNSS将复杂的卫星和无线电技术相结合,为导航接收机提供无线电
信号,这些信号中包含了发送时间和发送信号的卫星的标识。本章将介
绍通过这些信号计算位置所需的数学运算。6.2 计算位置
6.2.1 测量信号行程时间的原理(伪距估算)
为确定位置,GNSS接收机必须接收来自4颗独立卫星的时间信号
(卫星1~卫星4),以便计算信号行程时间Δt1 ~Δt4 (见图6-
1)。
计算受到地心原点三维笛卡儿坐标系的影响(见图6-2)。用户与
这4颗卫星中的每一颗的距离R1 ,R2 ,R3 和R4 可通过这4颗卫星与用
户之间的行程时间Δt1 ,Δt2 ,Δt3 和Δt4 来确定。如果已知这4颗
卫星的位置XSat ,YSat 和ZSat ,就可以计算出用户的坐标。
由于卫星上载有原子钟,因此可以非常准确地知道卫星发送信号的
时间。所有的卫星时钟都相互校准并与UTC(协调世界时)同步,而接
收机时钟与协调世界时并不同步,较之或慢或快Δt0 。如果用户时钟
较快,Δt0 的符号为正。时间误差Δt0 造成信号行程时间测量和距离
R不准确。因此,测得的不准确距离被称为伪距PSK [1] 。图6-1 必须接收来自4颗卫星的信号
图6-2 三维坐标系
Δtmeasured =Δt+Δt0 (6-1)PSR=Δtmeasured ・c=(Δt+Δt0 )・c (6-2)
PSR=R+Δt0 ・c (6-3)
式中:R――卫星与用户之间的真实距离;
c――光速;
Δt――从卫星到用户的信号行程时间;
Δt0 ――卫星时钟与用户时钟之差;
PSR――伪距。
在笛卡儿坐标系中,卫星与用户之间的距离R计算如下:
将式(4)代入式(3):
为确定4个未知变量(Δt0 ,XUser ,YUser 和ZUser ),需要4个独
立方程。
以下等式对这4颗卫星成立(i=1~4):
[1] Manfred Bauer:《测量与卫星定位》,Wichman出版社,海德堡,1997年,ISBN 3-87907-
309-06.2.2 方程的线性化
式(6-6)中的4个方程构成了非线性方程组。为求解该方程组,根
据泰勒模型先将根函数线性化,在这里只展开第一级(见图6-3)。
图6-3 泰勒级数转换
通常表示为(令Δx=x-x0 ):f(x)=f(x0 )+ (x0 )
・Δx+ (x0 )2 ・Δx+ (x0 )3 ・Δx+…
可简化为(只展开第一级):f(x)=f(x0 )+f′(x0 )
・Δx (6-7)
为将式(6-6)的4个方程线性化,必须引入一个接近X的任意估算
值x0 。这意味着先使用估算位置XTotal ,YTotal 和ZTotal ,而不是直接
计算XUser ,YUser 和ZUser (见图6-4)。图6-4 估算位置
该估算位置含有由未知变量Δx,Δy和Δz产生的误差。
XUser =XTotal +Δx
YUser =YTotal +Δy
ZUser =ZTotal +Δz
(6-8)
可通过类似于方程(6-4)的方式计算卫星与估算位置之间的距离
RTotal :
将方程(6-9)与方程(6-6)和方程(6-7)组合可得:
再经过偏微分,可得到以下结果:6.2.3 解方程
对方程(6-11)(i=1~4)进行代换后,可根据线性代数法则解出
这4个变量(Δx,Δy,Δz和Δt0 ):
根据方程(6-8),用Δx,Δy和Δz的解重新计算估算位置XTotal
,YTotal 和ZTotal 。
XTotal_New =XTotal_Old +Δx
YTotal_New =YTotal_Old +Δy
ZTotal_New =ZTotal_Old +Δz
(6-14)
此时可通过标准迭代处理将估算值XTotal_New ,YTotal_New 和ZTotal_New 代入方程组(6-13),直至误差分量Δx,Δy和Δz小于所要
求的误差(即0.1m)。根据初始估算的不同,要使误差分量小于1cm通
常需要进行3~5次迭代计算。6.2.4 小结
为确定位置,用户(或用户的接收机软件)或者使用最新的测量
值,或者估算一个新位置并通过反复迭代直至计算出的误差分量
(Δx,Δy,Δz)降至零。这可以表示为:
XUser =XTotal_New
YUser =YTotal_New
ZUser =ZTotal_New
(6-15)
Δt0 的计算值对应于接收机时间误差,可用来调整接收机时钟。6.3 确定行程时间的具体方法
6.3.1 时间系统
在确定从卫星到接收机的信号行程时间时,分清不同的时间系统至
关重要(参见3.5节)。
●UTC,协调世界时(参见3.5.2节)。
●GPS时,用于GPS系统的时间系统。GPS时与协调世界时的差别在
于所有累计的秒数(2008年相差14s)以及低于1μs的误差。GPS时与协
调世界时之差以及该差值的当前特性通过导航电文(子帧4,第18页)
发送。
●卫星时,每颗卫星的星上时间。卫星时与GPS时的具体差值以及
该差值的当前特性通过导航电文(子帧1,第1至25页)发送。
●接收机时,GPS接收机的内部时间。该时间通常由内部的石英晶
体振荡器确定,有别于GPS时和或协调世界时。该差值T0在GPS接收机
开始工作时未知,但经过数次测量后可以降低。6.3.2 确定行程时间的具体方法
以下部分讨论了确定信号行程时间所需的方法。为了保留该方法的
全貌,对该过程的描述做了大量简化。行程时间用于计算自卫星至接收
机的距离(R)。图6-5表示了距离(R)与行程时间的线性相关性(图
上给出了最初的2μs)。
图6-5 根据信号行程时间Δt确定距离(R)(c=光速)
6.3.2.1 第1步:通过相关性确定信号到达时间
GPS接收机会接收到来自1颗或多颗卫星的信号。每个信号都具有相
关性。在此描述的相关处理是针对单个信号的,但所有的卫星信号都必
须进行同样处理。
由于接收机在接收信号时发射信号的卫星数量(x)是未知的,接
收机会生成各种PRN码(x=1~32)。将这些编码按时间平移,直至某个
PRN码与卫星信号x的时间和信号形式达到最大相关(图6-6:时间平移
为t2 时达到最大相关)。图6-6 搜索最大相关
所需的时间平移ΔtKo 和接收机时标(如毫秒间隔)确定了所观测
卫星信号的到达时间(时间以接收机时给出)。在图6-7中测得到达时
间的精确值为2h 25min35.7293s。
图6-7 确定卫星信号到达时间6.3.2.2 第2步:对数据和或导航电文进行重构
搜索并保持最大相关,即卫星信号与接收机生成的PRN序列连续同
步。将时移的PRN序列(CA码)与卫星信号关联,由此可重构导航电文
(见图6-8)。
图6-8 重构导航电文6.3.2.3 第3步:确定发送时间
导航电文的每个子帧(参见4.6节)以8bits的报文头开始。遥测字
(TLM)报文头的结构定义为10001011的模式,该比特序列每6s重复一
次。在导航电文带有17bits星期时(TOW)电文的首个子帧的转换字
(HOW)中,包含有该报文头的发送时间(以卫星时表示)。
图6-9 导航电文的遥测字(TLM)和转换字(HOW)
此时GPS接收机开始在导航电文中搜索10001011模式。由于该模式
也可能在导航电文的其他部分出现,因此还必须符合其他参数条件:
●两个逻辑0必须出现在假定的报文头之后第51比特和第52比特
(转换字的最后两个奇偶校验位设为0)。
●从假定的报文头之后第16比特开始的奇偶校验位(遥测字的奇偶
校验位)必须正确。
●假定的报文头之前的两比特必须为0(子帧结束位置的每个字最
后的奇偶校验位设为0)。
●从假定的报文头之后第22比特开始的遥测字电文(17bits)中给
出的时间必须大致正确。由于每6s反复提供时间信息,因此对接收机的
时间测量精度要求不必太高。
●下一个子帧的报文头必须正好在假定的报文头之后第300比特开
始。如果系统确认达到上述条件之一,则不必再比较所有的约束条件。
报文头第一比特的发送时间位于上一帧导航电文的遥测字中。该时
间以卫星时给出,但由于该信息包含在导航电文中,可将其转换为GPS
时。6.3.3 确定行程时间误差
如果报文头有效,则测量报文头第一位的到达时间(参见6.3.2.1
节)。该时间以接收机时给出。由于接收机时与GPS时并不一致,而是
相差Δt0 ,因此测得的行程时间不准确。图6-10给出了确定行程时间
误差的过程(比较图6-5)。这里使用了两种不同的时标:
●信号发送时间采用GPS时;
●信号到达时间采用接收机时。
图中还给出了接收机时与GPS时之差Δt。
t测量 =Δt+Δt0 =到达时间接收机时 -发送时间GPS时
式中:Δt――卫星到发射机真实信号行程时间;
t0 ――接收机时与GPS时之差。6.3.4 影响行程时间的其他因素
从卫星到接收机的信号行程时间不仅取决于距离,还受到其他一些
物理因素的影响。在文档“Navstar GPS空间部分导航用户接口 [1]”中给出了有关考虑多种参数进行修正的示例(见图6-11)。
图6-10 确定行程时间误差图6-11 确定修正的行程时间示例
[1] 《接口规范》,IS-GPS-200,版本D,IRN-200D-001,2006年3月7日,第92页。6.4 误差分析与精度因子
6.4.1 引言
到目前为止,尚未考虑计算中的误差量。在GNSS技术中,总误差可
能会由各种原因造成:
●卫星时钟:尽管每颗GPS卫星都配有4台高精度原子钟,但10ns的
时间误差足以产生相当于3m的定位误差。
●卫星轨道:一般来说,卫星位置的真实值只能做到1~5m的精
度。
●光速:信号以光速从卫星出发。它们在穿越电离层和对流层时会
减慢,因此不能将其视为常数。这种与标准光速的偏差会给计算位置带
来误差。
●信号行程时间误差测量:全球卫星导航系统接收机只能以有限的
精度确定输入的卫星信号时间。
●多径效应:由于接收到被反射的信号,误差量会进一步加大。
●卫星几何形态:如果用于测量的4颗参考卫星较为接近,确定位
置会更加困难。卫星几何形态对测量精度的影响被称为DOP(精度因
子,Dilution Of Precision的缩写)。
测量误差的成因有多种。表6-1给出了不同误差源所导致的水平位
置误差范围。
通过采取修正措施,DGPS(差分GPS,参见7.6节)可将误差源的数
量减少或降低。6.4.2 卫星几何形态对精度的影响,DOP值
6.4.2.1 引言
GPS导航的定位精度一方面取决于各个伪距测量,另一方面取决于
所用卫星的几何构型。该构型可用一个标量来表示,在导航领域中称为
DOP(精度因子)。
DOP值描述了对精度的削弱程度,因而它是星座与不精确度之间相
关性的因子或度量。如果DOP值较高(例如,所有可见的卫星彼此之间
比较接近),则预期的不精确度也会升高。
使用的其他DOP术语有:
●GDOP(Geometric-DOP,几何DOP):描述卫星几何形态对三维空
间和时间测量精度的影响。
●PDOP(Positional-DOP,位置DOP):描述卫星几何形态对三维
空间位置的影响。
●HDOP(Horizontal-DOP,水平DOP):描述卫星几何形态对平面
定位的影响(二维)。
●VDOP(Vertical-DOP,垂直DOP):描述卫星几何形态对高度
(一维)的影响。
●TDOP(Time-DOP,时间DOP):描述卫星几何形态对时间测量的
影响。
卫星几何形态对不精确度的影响如图6-12所示。当两颗卫星之间的
间距较大时(左图),定位误差(红色区域)较小。如果它们彼此较为
接近(右图),则误差区域较大。这一原理适用于需确定的位置存在不
确定性时,称为距离误差(R-E:黄色和蓝色区域),对两颗卫星同样
起作用。R(R1 和R2 )代表测得的从卫星到用户的距离(伪距)。图6-12 以距离R1 和R2 为半径作圆,交点处的夹角越平坦,DOP值越高6.4.2.2 图解DOP值成因
GPS在导航模式下的位置计算精度一方面取决于各个伪距测量,另
一方面取决于所用卫星的几何构型(以DOP值表示)。如果用来测量的4
颗卫星彼此较为接近时,位置精度会下降。测量精度与DOP值成正比。
这意味着如果DOP值加倍,位置误差也以两倍的因子增加。
一般来说,总位置误差可表示为其他误差的总和乘以DOP值。
(由其他因素造成的位置误差)・(DOP值)
可将DOP值视为由卫星和用户所在位置构成的四面体体积的倒数
(见图6-13)。随着四面体体积的增加,DOP值的量值(即不精确度)
下降。
图6-13 封闭的体积越大,DOP值越小6.4.2.3 DOP值的实际含义
在开阔的无障碍区域,卫星覆盖非常有利,DOP值很少超过3(见图
6-14)。
在山区、丛林和城区,DOP值在计划测量项目时起到重要作用。这
是由于卫星在很多阶段处于非常不利的几何星座构型,因此有必要根据
DOP值(如HDOP)计划测量项目,或者评估在数分钟内可能出现的各种
DOP值下可达到的精度。
借助由领先的GPS设备制造商提供的所有计划和评估工具,可将DOP
值可视化。图6-15给出了一个开阔区域、卫星可视性(阴影部分)无障
碍的HDOP值示例(最大HDOP<1.9)。图6-16给出了一个卫星可视性受
到严重阻碍区域的HDOP值示例,该位置的最大HDOP值经常超过20。自
180°至270°的区域受到一座高层建筑物的阻挡,自270°至180°可见
性受到山峰阻碍的影响。图6-14 DOP值与24h内经过开阔区域的卫星数量
图6-15 24h内的HDOP值,无遮挡阻碍区域的卫星可视性(最大HDOP<1.9)
由于受大范围遮挡,只偶尔有机会(如11:00~12:30之间,见图6-
16)出现最佳DOP值(<2)可供确定位置。在DOP值超过6(如9:00~
9:30之间)的期间应避免精确测量。
可根据当前卫星星座来估算DOP值(见图6-17和图6-18)。6.4.2.4 总误差
测量精度与DOP值成正比。这意味着当DOP值加倍,定位误差也会翻
番。
图6-16 24h内的HDOP值,受到较强的遮挡阻碍区域的卫星可视性(最大HDOP>20)
图6-17 卫星星座不利时的DOP值图6-18 卫星星座有利时的DOP值
一般可表示为:误差(1σ)=1×RMS值×DOP值
误差(2σ)=2×RMS值×DOP值
在表6-2中给出了1σ(1σ=68%)和2σ(2σ=95%)时的误差值。
这些数值在HDOP=1.3的中等卫星星座情况下有效。通过采用适当的修正
方法(例如:联合使用若干接收机(差分GPS,即DGPS,参见第7
章)),可减少或降低误差源数量(通常为1~2m,1σ值)。
通常精度要好于表中给出的数据。来自美国联邦航空局的长期测量
数据表明,在全部测量结果中95%的情况下,水平误差小于7.4m、垂直
误差小于9.0m。测量的时间周期通常为24h。
美国国防部称,其系统为标准民用应用提供的水平精度为13m,垂
直精度≤22m,时间精度为40ns。通过采用其他措施(如DGPS)、延长
测量时间和特殊测量技术(相位测量),可将位置精度提高到1cm以
内。6.4.2.5 计算DOP值
各个DOP值可根据卫星和GPS用户的位置来确定。
在图6-19中,Ri (i=1~4)为从卫星到用户的距离。
根据图6-19所示情况,可得到所谓的位置矩阵。
通过对位置矩阵进行变换([]T )、乘法(・)和转置([]-1 ),可计算出DOP矩阵D(通过将行向量变换为列向量 [1] ):图6-19 卫星和用户位置描述(笛卡儿坐标)
D=[[P]T ・[P]]-1
根据矩阵运算法则,16元的DOP矩阵表示如下:
然后通过矩阵D的矩阵元素来确定各个DOP值:部分DOP值可直接由其他DOP值导出,例如:
如果可见的卫星多于4颗,GPS接收机从中选择DOP值最佳的4颗卫星
来计算位置。
[1] http:www.scilab.orgcontribindex_contrib.php?page=download&
category=MANUALS,http:en.wikipedia.orgwikiTranspose第7章 改进的GPS:DGPS、SBAS、A-GPS和HSGPS
如果你想了解……
○哪几类误差影响定位精度
○DGPS指的是什么
○修正值是如何确定和转发的
○D信号如何修正有误差的位置测量
○在中欧可使用哪些DGPS服务
○EGNOS和WAAS指的是什么
○A-GPS是如何工作的
如果是这样,你应该阅读本章!
7.1 引言
尽管GPS最初计划用于军事目的,但目前主要还是用于民用,例如
测量、导航、定位、测速、测定时间等。GPS最初并未考虑用于精度要
求高、有安全措施或在室内使用的应用。
●为提高定位精度,引入了差分GPS(D-GPS)。
●为提高定位精度和完整性(可靠性,对于安全应用至关重要),实施了EGNOS和WAAS之类的SBAS(星基增强系统)。
●为提高在室内的灵敏度,或相应降低捕获时间,开始提供辅助
GPS(A-GPS)服务。
●不断改善GPS接收机的接收特性,通过高灵敏度GPS(HSGPS)技
术使接收机灵敏度不断提升。7.2 GPS误差源
在上一章里讨论了定位精度约为12m(HDOP为1.5时占全部测量数据
的95%),这不足以满足所有应用。为达到1m或更高的精度,需要采取
其他措施。GPS测量总误差来自不同的误差源。表6-1给出了这些误差的
成因和总误差。这些数值应被视为典型平均值,并且对于不同的接收机
也会有所不同。
经深入研究,发现误差起因如下:
●星历数据:在发送信号时卫星位置精度一般只能达到1~5m。
●卫星时钟:尽管每颗卫星都携带了4台原子钟,但时基会有偏
差。对于稳定性为10-13 的振荡器,其时间误差可达10ns。10ns的时间
误差产生的距离误差约为3m。
●电离层影响:电离层是位于距地面60~1000km之间的大气层。电
离层中的气体分子被严重电离。电离主要是由于太阳辐射所致(仅发生
在白天!)。信号以光速从卫星发出穿越真空。在电离层内,这些信号
的速度减慢,因此不能再被视为常数。电离的程度取决于时间和地点,在白天及赤道地区最为严重。如果电离强度已知,可在一定程度上通过
地理修正模型进行补偿。此外,如果信号速度的改变与频率相关,还可
通过使用双频GPS接收机进行额外修正。
●对流层影响:对流层是位于距地面0~15km之间的大气层。其误
差成因是气体分子密度和空气湿度的变化。密度随着高度的增加而下
降。密度或湿度的增加减缓了卫星信号的速度。为修正这一影响,采用
基于标准大气(P)和温度(T)的简化模型:
○H=高度(m)
○T=288.15K-6.5×10-3 H(K)
○P=1013.25mbar(T288.15K)5.256 (mbar)
●多径效应:GPS信号会被建筑物、丛林、山峰等反射,在到达接收机之前形成回波。信号会因干涉而失真。多径效应可通过选择测量位
置(避免反射)、测量时间和使用好天线等方法获得一定程度的补偿
(见图7-1)。
图7-1 在反射情况下对测量时间的影响
●接收机影响:还有一些误差是由于GPS接收机测量噪声和接收机
内的时间延迟造成的,可使用更先进的技术来削弱这一影响。
●卫星星座(包括遮挡(DOP))的影响:在6.4.2节中详细探讨了
这一影响。7.3 减小测量误差的可行性
降低造成测量误差的影响可显著提高定位精度。为减小测量误差使
用了各种方法,而且通常联合使用。通常采用的处理有:
●通过双频测量补偿电离层影响:电离层对测量误差的影响最大
(参见7.2节)。如果发射的无线电信号穿越电离层,低频信号受减缓
影响更为严重。通过使用两种不同的信号频率(如L1L2),可以在很
大程度上补偿电离层的影响。由于GALILEO和GPS(在现代化之后)将至
少以两个频率发送民用信号,因此极有可能会采用这一补偿原理。
信号传送时间的增加取决于电离的程度。电离层对于传送时间增加
的影响主要在于低频,对传送时间的影响与频率呈平方关系。
如果信号速度减慢,则会使计算出的卫星与接收机之间的距离变
长。伪距(PSR)的测量误差及其与频率和电离程度的关系如图7-2所
示。
图7-2 伪距测量误差及其与电离和频率的关系
由于每颗卫星的信号传输经过不同的电离区域,伪距测量误差对每
颗卫星也有所不同,因此对这些误差进行补偿非常重要。如果卫星以两
种频率发送导航信息(f1 和f2 ),可通过以下公式确定频率f1 的伪距测量误差(ΔPSR1 ) [1] :
PSR1 和PSR2 分别为测得的f1 和f2 的伪距。计算出的测量误差
(ΔPSRi )可用于对方程(13)中的PSRi 值进行修正(参见6.2.3
节)。
●地理修正模型:该模型主要用来补偿电离层和对流层的影响。修
正因子仅在应用于特定或有限区域时才有效。
●差分GPS(DGPS):通过与一个或若干个基站进行比较,可对各
种误差进行修正。可通过后处理或实时(RT)方式对来自这些基站的修
正数据进行评估。实时解决方案(RT DGPS)需要基站与移动接收机之
间进行数据通信。DGPS采用的差分处理方式有:
○实时DGPS,通常基于RTCM SC104标准;
☆基于信号行程时间延迟测量的DGPS(伪距修正,精度可达1m左
右)
☆基于载波信号相位测量的DGPS(精度可达1cm左右)
○后处理(事后对数据进行修正和处理)。
●通过选择地点和测量时间来提高卫星的“可见性”(参见6.3节有关DOP的说明)。
7.3.1 基于信号行程时间延迟测量的DGPS
基于信号行程时间测量(伪距或CA码测量)的DGPS的原理非常简
单。GPS基准站的位置已知并且是经过精确测量的点。GPS基准站通过4
颗或更多的卫星确定其GPS位置。如果已知GPS基准站的精确位置,就可
以计算出测量位置与实际位置的位置偏差,以及更为重要的测得的与各
颗卫星之间的伪距。这些偏差对GPS基准站附近200km范围内的所有GPS
接收机有效。在完成测量后,这些偏差或者立即通过无线电发送,或者
用于以后的修正(后处理,参见7.3.3节)。
重要的是,这种修正是基于卫星伪距值而不是对于GPS基准站的具
体位置偏差。偏差是基于到特定卫星的伪距,因而可能会因位置以及所
使用的卫星而变化。如果未考虑这一因素直接按基准站的位置偏差进行
修正,可能会导致错误的结果。图7-3 使用GPS基站的DGPS原理
7.3.1.1 工作原理详细说明
误差补偿可分三步完成:
1.确定基准站的修正值;
2.从基准站向GPS用户发送修正值;
3.对确定的伪距进行补偿以修正计算出的GPS用户位置。
[1] Elliot D.Kaplan,《了解GPS》,第二版,Artech House,第313页。7.3.1.2 确定修正系数
精确位置已知的基准站测量所有可见GPS卫星的L1信号的行程时间
(见图7-4),并使用这些测量值来计算相对于这些卫星的位置。这些
测量值中一般会带有误差。由于基准站的真实位置是已知的,因此可计
算出与每颗GPS卫星的实际距离。通过简单的减法可计算出实际值与测
量距离之差,并由此得到相应的修正系数。不同GPS卫星的修正系数是
不同的,且此修正系数只适用于数百千米范围内的GPS用户。
图7-4 确定修正系数7.3.1.3 发送修正值
如果这些修正值可用于广大区域内的其他GPS用户对其测量的伪距
进行补偿,则通过适当的媒介(电话、无线电等)立即将其发送(见图
7-5)。
图7-5 发送修正系数7.3.1.4 对测量伪距的修正
收到修正值后,GPS用户就可以对伪距进行补偿以确定到卫星的实
际距离(见图7-6)。这些实际距离随后可用于计算用户的准确位置。
通过这种方式可修正除由接收机噪声和多路径接收所致误差之外的所有
误差。
图7-6 对测量伪距的修正7.3.2 基于载波相位测量的DGPS
DGPS通过测量信号行程时间可达到1m的精度,但这仍不足以满足某
些要求,例如在解决有关测量方面的问题时。为了获得毫米级精度,必
须计算卫星信号的载波相位。
载波的波长约为19cm。可通过图示方法确定到卫星的距离(见图7-
7)。
图7-7 相位测量原理
由于N未知,因此相位测量较为模糊。通过在不同的时间观测若干
颗卫星,同时不断比较来自用户和基准站接收机的结果(在测量过程中
或之后),在经过大量的数学方程运算后可使计算出的位置精度达到数
毫米。7.3.3 DGPS后处理(信号行程时间和相位测量)
DGPS后处理是在现场测量完成后通过使用适当软件来确定修正系
数。基准数据可通过特定基准站或可公开访问的服务器系统获得。其缺
点在于:现场数据中存在的问题(例如,卫星信号接收条件不佳、文件
损坏等)有时要到完成修正系数计算并广播后才会发现,为此需要重复
整个过程。7.3.4 发送修正数据
DGPS服务从基准站收集数据并通过无线电将数据发送给移动接收
机。可以使用多种信道来播发这些修正数据。这些播发系统都拥有各自
的无线电技术特性和频率范围,用于DGPS时有其特定的优缺点(见表7-
1)。
许多国家建立了自己的系统用来发送修正数据。对所有这些系统的
全面介绍超出了本概述的范围,下面将分别介绍其中的一些系统。7.3.5 根据播发范围对DGPS进行分类
根据修正信号的播发范围可将各种DGPS服务作如下分类:
●本地DGPS:区域增强系统(LAAS),有时也称为陆基增强系统
(GBAS);
●地区DGPS;
●广域DGPS(WADGPS)或星基增强系统(SBAS):利用卫星发送
DGPS修正信号。在此情况下,使用的不是单个基准站,而是整个基准站
网络。7.3.6 修正信号发送标准
DGPS发射台发送信号行程时间和载波相位修正信号。大部分陆基增
强系统和某些星基广域DGPS(LandStar-DGPS、MSAT、Omnistar或
Starfire)根据RTCM SC-104标准发送DGPS修正数据。通常接收机必须
配备一个该服务特定的解码器以接收和处理数据。
而WAAS、EGNOS和MSAS之类的星基增强系统则采用RTCA DO-229标
准。由于RTCA的频率和数据格式与GPS兼容,因此现代GNSS接收机无需
额外的硬件就可处理RTCA数据,这与RTCM形成了对比(见图7-8)。
表7-2列出了DGPS修正信号采用的标准以及与GNSS具体相关的参
考。
图7-8 基于RTCM和RTCA标准的DGPS系统对比7.3.7 差分修正服务概览
差分修正服务概览如下所示:7.4 DGPS实时修正服务
7.4.1 引言
所有的修正数据都通过适当的方式(AM、短波、FM、GSM、互联
网、卫星通信等)发送到能被用户接收机接收的区域。在北美和欧洲,可收到来自多个公共DGPS服务的修正信号。根据服务的不同,购买DGPS
接收机时可能需要收取每年的许可费用或一次性费用。
在全世界有非常多的陆基DGPS服务,也称为陆基增强服务
(GBAS),下面对此作详细介绍。许多国家还提供了多个系统,为此下
节将介绍其中的一些服务。此外,将对一些或多或少提供了全球覆盖
(星基)的服务作较详细的介绍。7.4.2 基于RTCM SC-104的地面服务
●SAPOS:(德国测绘局卫星定位服务)是一项永久提供的DGPS服
务,可在整个德国使用。该系统以一个GPS基准站网络为基础。对于实
时修正值,使用FM无线电、长波、GSM及其自有的2m波段(VHF)频率发
送数据。FM无线电发射台以RASANT(无线电辅助卫星导航技术)格式播
发修正数据信号。它将用于数据传输的RTCM2.0格式转换为FM播音使用
的无线电数据系统(RDS)格式。SAPOS包含几种功能和精度各不相同的
服务 [1] :
○SAPOS EPS:实时定位服务
○SAPOS HEPS:高精度实时定位服务
○SAPOS GPPS:大地精确定位服务
●Swipos:(瑞士定位服务 [2] )通过移动电话网络或通过互联网
(GSMGPRS)分发修正数据。Swipos提供两类服务:
○Swipos-NAV(服务精度达到米级)
○Swipos-GISGEO(服务精度达到厘米级)
●无线电信标:无线电信标是遍布全世界的导航装置,主要沿海岸
分布。它们以300kHz左右的频率发送DGPS修正信号。根据广播电台的不
同,信号比特率在100~200bits之间。例如,2002年12月,AMSA(澳
大利亚海上安全局)在澳大利亚建立了一个由16个台站组成的完整DGPS
网络。这些台站以294~320kHz的频率发送信号,可在约275km的范围内
收到信号(见图7-9 [3] )。
[1] http:www.sapos.de
[2]
http:www.swisstopo.admin.chinternetswisstopoenhomeproductsservicesswipos.html
[3] http:www.amsa.gov.auPublicationsFact_sheetsDGPS_Fact_Sheet.pdf7.4.3基于RTCMSC-104的卫星服务
有数颗地球同步卫星不间断地发送修正数据。可使用Omnistar、Starfire和MSAT名下提供的各种服务。
图7-9 澳大利亚的无线电信标覆盖
●Omnistar通过6颗地球同步卫星发送修正数据(见图7-10 [4])。三种服务须付费,并且用户使用时必须配备专用的接收机解码器
[5] 。Omnistar通过L波段(1~2GHz)向地面发送信息。其基准地面站
遍布全世界。图7-10 6颗Omnistar卫星覆盖的地区(两个覆盖区之间相互重叠)
●NavCom Technology公司下属的Starfire也通过6颗地球同步卫星
发送修正数据(见图7-11 [6] )。服务需付费,并且用户使用时必须配
备专用的接收机解码器。Starfire通过L波段(1~2GHz)向地面发送
信息。其基准地面站遍布全世界。
图7-11 Starfire覆盖的地区
[4] http:www.seastar.co.ukcoverage.html
[5] http:www.omnistar.com
[6] http:www.navcomtech.comStarFire7.5 广域DGPS(WADGPS)
7.5.1 星基增强系统,SBAS(WAAS,EGNOS)
7.5.1.1 引言
星基增强系统(SBAS)用于提升GPS、GLONASS和GALILEO(待其运
营后)的功能,它通过地球同步卫星将GPS或GLONASS的修正数据和完整
性数据以GNSS频率播发。7.5.1.2 最重要的SBAS功能
由于定位精度和定位信息可靠性的改进,SBAS与GPS相比是一个相
当大的进步。与GPS不同,SBAS通过不同的地球同步卫星提供额外的信
号广播。
●通过修正数据提高定位精度:SBAS提供差分修正数据,由此可提
高GNSS的精度。首先是因信号通过电离层时的延迟造成的电离层误差,需要对此进行修正。电离层误差随着每天的时间发生变化,并且因地区
而异。为确保数据在大陆上有效,需要运营一个复杂的地面站网络,以
便计算电离层误差。除了电离层参数,SBAS还发送有关卫星位置(星
历)和时间测量的修正信息。
●提高完整性和安全性:SBAS监视每一颗GNSS的卫星,同时会在卫
星出错或发生故障后的6s内发出警报通知用户。只有当接收到的信号质
量一直低于特定限制时,才发送这类“是否”信息。
●通过播发导航信息提高可用性:SBAS地球同步卫星发送的信号与
GNSS的信号类似,但它缺少精确的时间数据。GNSS接收机可将这些信号
通过一种称为“伪距化”的过程解读出位置。7.5.2 现有系统和计划中的系统概览
尽管所有的星基增强系统(SBAS)覆盖了非常广阔的地区,但它必
须确保彼此之间兼容(互操作性),SBAS提供商互相合作,并在方法上
达成一致。通过使用RTCA DO-229C标准确保了兼容性。目前,在图7-12
中标出地区使用的兼容SBAS系统已处于工作或开发之中。
●北美(WAAS,广域增强系统):美国联邦航空局(FAA)领导了
广域增强系统(WAAS)的开发,该系统覆盖美国、加拿大和墨西哥(见
图7-12 [1] )。广域增强系统通过位于西经133°和西经107°的两颗卫
星(Anik F1R和Galaxy 15)工作 [2] 。
图7-12 广域增强系统覆盖地区
●欧洲(EGNOS,即欧洲地球同步卫星导航重叠服务):由ESA、欧
盟和欧洲安全导航组织组成的欧洲集团正在开发EGNOS。该系统旨在覆
盖欧洲民航会议(ECAC)所辖的地区。截至2009年2月,该系统尚未最
终转入运营,可能不会在安全性要求较高的应用中使用(如航空)。从
以下文献 [3] 可了解目前EGNOS卫星的信号发送情况。
●日本(MSAS,即多功能星基增强系统以及QZSS,即准天顶卫星系统):MSAS使用两颗地球同步卫星,QZSS计划使用多达3颗高地轨道卫
星(高倾角椭圆轨道,见图7-13)。这两路MSAS信号通过MTSAT-1R和
MTSAT-2卫星发送 [4] 。到2008年初,MTSAT-1R已投入运营。QZSS通过
发送GPS信号以及完整性或修正信号为GPS提供补充信息 [5] 。QZSS特殊
的高地轨道星座确保了在日本上空的天顶附近(仰角为75°~90°)至
少有一颗卫星可见(见图7-14 [6] ),这将改善狭窄的都市峡谷中的定
位精度。首颗QZSS卫星于2010年底投入运营。
图7-13 QZSS的卫星轨道和地面轨迹
图7-14 QZSS的卫星轨道、地面轨迹以及在东京上空的仰角
●印度(GAGAN,即GPS与GEO增强导航):印度空间研究组织(IS-RO [7] )开发了一种与其他SBAS兼容的系统,这种名为GAGAN的系统于
2008年开始通过国际海事卫星4F1 IOR发送测试信号。2009年之后,GAGAN将使用地球同步卫星GSAT-4运营。新的GAGAN卫星将定点于东经
82°。
●俄罗斯(SDCM,即差分修正和监控系统):俄罗斯为其疆域设计
了一个系统,以便通过各监测站控制GPS和GLONASS信号。地球同步卫星
将向俄罗斯疆域发送用于GPS和GLONASS的修正信号和完整性信号。
图7-15 WAAS、EGNOS、GAGAN和MSAS的位置和覆盖地区
地球同步卫星(表7-3 [8] )从高度约36000km的赤道上空向该地区
播发信号。某些SBAS卫星的位置目前尚不清楚。每颗卫星已分配了伪随
机码(PRN) [9] 。信号的广播频率与GPS(L1,1575.42MHz)相同,这
意味着接收SBAS地球同步卫星信号的接收机不需要额外的硬件投资。[1]
http:www.faa.govaboutoffice_orgheadquarters_officesatoservice_unitstechopsnavservicesgnsswaasnews
[2]
http:www.faa.govaboutoffice_orgheadquarters_officesatoservice_unitstechopsnavservicesgnsswaas
[3] http:esamultimedia.esa.intdocsegnosestbIMAGEtechimagetech_realtime.htm
[4] http:www.jma.go.jpjmajma-engsatelliteindex.html
[5] http:qzss.jaxa.jpis-qzssindex_e.html
[6] Quasi Zenith Satellite System Navigation Service Interface Specifications for
QZSS Draft
[7] http:isro.gov.in
[8] http:celestrak.comNORADelementssbas.txt
[9] http:www.losangeles.af.milsharedmediadocumentAFD-070530-036.pdf7.5.3 计划中的RNSS概览
RNSS是区域导航卫星系统(Regional Navigation Satellite
System)的缩写。RNSS与GPS、GLONASS和GALILEO互为对应补充,统称
为全球导航卫星系统(GNSS),从而实现全球范围的导航和定位。RNSS
只能用于有限地区的导航(例如独立的国家)。因为从SBAS可非常平滑
地过渡到RNSS,所以计划中的RNSS与SBAS同时推出。计划中的区域导航
卫星系统如下:
●印度(IRNSS,印度区域导航卫星系统):IRNSS是一个由3颗地
球同步卫星和4颗与赤道平面夹角为29°的地球同步卫星组成的导航系
统 [1] ,该系统将于2014年投入使用。
●日本(QZSS,准天顶卫星系统):该系统是对GPS的补充,参见
前节介绍(参见7.5.2节)。
[1] http:www.isro.orgnewslettersspaceindiaaprsep2006Satnavindustry.htm7.5.4 SBAS系统描述
其复杂的地面部分由若干基准站、地面控制中心和2~3个卫星地面
站组成(见图7-16)。每个系统采用了自己命名的台站。表7-4对这些
命名进行了比较。
图7-16 所有星基增强系统SBAS的工作原理
●基准站:在SBAS覆盖的地区有数个相互连成网络的基准站,这些
基站接收GNSS信号且其位置已被精确测定。每个基站确定出相对于卫星
的实际位置与计算位置之间的偏差(伪距),然后将数据发送给控制中
心。
●控制中心:控制中心对来自基准站的修正数据进行评估,确定各基站收到的所有GNSS信号的精度,检测可能由电离层湍流造成的不精确
性,并监视GNSS的完整性,然后将有关上述变化的数据通过分布各处的
卫星地面站加入到信号中并发送。
●卫星地面站:这些台站向不同的地球同步卫星播发信号。
●地球同步卫星:SBAS地球同步(地球静止轨道)卫星收到这些来
自地面站的信号后,将其播发给GNSS用户。与全球导航卫星不同,地球
同步卫星未配备星载信号发生器,而是配备的转发器,能将经地面处理
并发送给它的信号转发出去。这些信号以GNSS L1频率(1575.42MHz)
向地球发送,配备了相应的GNSS接收机的用户可接收并处理SBAS信号。7.5.5 使用RTCM SC-104的卫星DGPS服务
这些服务使用若干颗地球同步卫星不间断地向全球播发修正数据。
下面列出了这些服务中的一部分,它们采用RTCM SC-104标准并需要特
殊的解码器。
●MSAT:由加拿大国家研究委员会开发,该服务通过两颗地球同步
卫星播发加拿大地区的DGPS(CDGPS)信号。
●Omnistar(Fugro Group)和LandStar-DGPS(Thales Company)
通过6颗地球同步卫星各自播发修正数据(见图7-17)。这些服务需要
付费,并且用户必须通过特殊的接收机解码器才能使用。Omnistar和
Landstar通过L波段(1~2GHz)向地球播发其数据。基站分布在世界各
地,地球同步卫星位于中纬度地平线上方(10°~30°)。建立无线电
通信时需要卫星可见。
●Starfire是NavCom Technology公司的下属公司,通过3颗
Inmarsat地球同步卫星播发修正数据。此项服务需要付费,并且用户必
须通过特殊的接收机解码器才能使用。Starfire通过L波段(1~
2GHz)向地球播发其数据。其所属的基站遍布全世界。地球上纬度在
±76°之间的地区可以使用该服务。图7-17 LandStar-DGPS和Omnistar覆盖的地区7.6 使用DGPS和SBAS可达到的精度
表7-5给出了使用和未使用DGPSSBAS时所能达到的典型定位精度。7.7 辅助GPS(A-GPS,AGPS)
7.7.1 引言
市场上结合了移动无线功能(如GSM、UMTS等)和卫星导航功能
(如GPS)的设备数量在不断增加(见图7-18)。这种组合通常用于基
于位置的服务(LBS)。可以说这些设备并非总处于工作状态,尤其是
定位通过GPS完成时更是如此,原因在于GPS接收机的功耗限制了电池工
作时间。
图7-18 移动接收机及集成了GPS模块的框图
由于GPS设备很少工作,它有可能没有关于卫星位置的信息。在停
用2h或更长的时间后,为能开始工作它必须首先下载卫星的轨道数据。
GPS接收机获取轨道数据并计算出首次位置一般至少需要18~36s的时间
(该时间称为首次定位时间:TTFF)。在不利的接收条件下(例如,城
区高层建筑妨碍了对天空的直视时),可能需要数分钟才能完成首次位
置的计算。启动慢是GPS固有的限制,无法通过改进接收机技术来克
服。当缺少轨道数据时,GPS接收机必须执行一次完整的搜索过程,以
便找到可用的卫星、下载数据和计算位置。在编码-频率域内对大约30
颗GPS卫星进行搜索非常耗时,编码-频率域每级的积分时间通常至少需
要1ms(1个CA码周期)。如果将频率范围按50Hz的步长划分(即频率
间隔为2×600050Hz=240Hz),则需要对多达1023×50=51150个位置
(bins)进行搜索(需要51s)。另请参见7.8节。7.7.2 A-GPS原理
在信号较弱时可通过提供额外的卫星轨道数据和其他GPS信息来快
速定位和测量。这些信息可通过其他信道获得,例如通过GSM、GPRS、CDMA或UMTS。这一应用称作辅助服务,并用于辅助GPS(A-GPS或
AGPS)。A-GPS是一种使用辅助数据来加速定位的功能或服务。GPS接收
机通过移动通信网络或直接经互联网获得辅助数据。辅助数据中包含以
下信息:
●卫星星座(星历);
●精确轨道数据(星历、轨道);
●时间信息;
●GPS接收机的多普勒频率和频移(误差)。
通过使用这些辅助数据,即便在不利的信号条件下GPS接收机也能
够迅速定位。在弱信号条件下,这通常是获取定位的唯一途径。取决于
辅助数据的复杂性和完整性,启动时间可能会显著缩短。剩余的启动时
间取决于GPS信号的强度。通常辅助信息的可用性和精度越高,启动时
间就越短。
图7-19给出了在使用各种辅助数据时近似的启动时间(首次定位时
间,即TTFF) [1] 。图7-19 使用不同的辅助数据时首次定位时间(TTFF)是信号强度的函数
集成了GPS设备的移动台仍需至少能看到4颗卫星。使用A-GPS时,GPS接收机需要一个用于接收辅助数据的接口。
通过减少轨道数据的接收时间从而最大程度节省了启动时间。此
外,如果已知GPS接收机的多普勒频率和频移,还可以限定搜索区域
(见图7-20)。这就加快了信号捕获,从而节省了时间。图7-20 使用A-GPS可减少搜索区域并加快搜索进程
[1] ......
您现在查看是摘要介绍页, 详见PDF附件(11865KB,285页)。