过程控制及其MATLAB实现第2版.pdf
http://www.100md.com
2020年12月9日
 |
| 第1页 |
 |
| 第4页 |
 |
| 第15页 |
 |
| 第23页 |
 |
| 第39页 |
参见附件(137471KB,408页)。
本书从基本概念出发,深入浅出地阐述了过程控制系统的本质与特点,同时配合大量的应用实例,力图使学生掌握过程控制系统分析、设计和优化的基本原理和方法。

内容简介
本书为国家精品课程“过程控制与集散系统”配套教材。本书系统地介绍了有关过程控制的理论与技术。全书共分13章,内容包括概述、过程控制系统建模方法、过程控制系统设计、PID调节原理、串级控制、特殊控制方法、补偿控制、关联分析与解耦控制、模糊控制、预测控制、先进控制和集散控制系统。
作者介绍
方康玲,武汉科技大学信息工程学院教授,主要研究领域为自动化,国家精品课程“过程控制‘主要负责人,主持编写《过程控制》、《模糊控制系统》等多本教材。
前言
本书为国家精品课程“过程控制与集散系统”的配套教材。
本书第1版于2009年1月出版,书名为《过程控制与集散系统》第2版,书名变更为《过程控制及其 MATLAB实现》。第2版在保持原书特色的基础上,对原书內容主要做了以下几个方面的调整与更新:重新编写了第5章“串级控制”,增加了串级控制器的控制规律;第9章“模糊控制”中增加了一节,介绍了新的工程实例;104节“广义预测控制”中增加了对模型辨识的内容;第12章“集散控制系统”修改部分DCS的概述增加现场总线控制系统(FCS);新增第13章“过程控制 MATLAB仿真本书主要有以下几个方面的特色:
(1)注重保证结构的完整性和内容的先进性。以过程控制系统的基本结构为脉络,在内容安排上既包含对过程控制系统设计的一般原理和方法的说明,也包含对复杂过程控制系统先进过程控制系统,以及集散控制系统的介绍。新增的模糊控制工程实例和现场总线控制系统等内容,反映了过程控制技术的新近发展与应用。
(2)注意理论和实践相结合。针对过程控制的工程实践特性,本书在具体理论讲解中引入了大量的工程实例,这些实例涵盖化工、冶金、电力等多个行业领域,有些实例来源于编者主持的实际过程控制项目,有利于读者了解过程控制方法的具体应用,增强其工程意识(3)新增了过程控制 MATLAB仿真实例。涵盖过程控制系统数学建模、PID调节、串级控制、各种复杂控制和先进控制等内容,仿真实例的引人有利于教师对相关教学内容的开展可加深学生对过程控制相关理论的感性认识和理解,提高其动手实践能力。并可作为教师教学或学生实验及课程设计的素材。
本书参考学时为32学时,必修章节为前8章;若作为研究生教学用书,可增加第9-12章的教学内容。相关教学资源可登录国家精品课程网站htp202.114.240202C1/zcr-lhmn获取参加本书编写工作的有:方康玲(第1、9章)、王新民(第2章)、陈林(第3章)、刘晓玉第4、13章)、黄卫华第5章)、孙灵芳(第6章)、吴怀宇(第7、8章)、刘斌(第10、11章)和潘炼(第12章)。由方康玲任主编,王新民、潘炼、吴怀宇和刘晓玉任副主编由于编者水平有限,不足之处仍在所难免,希望读者继续指正
过程控制及其MATLAB实现第2版预览






图书目录
目 录
第1章 概述
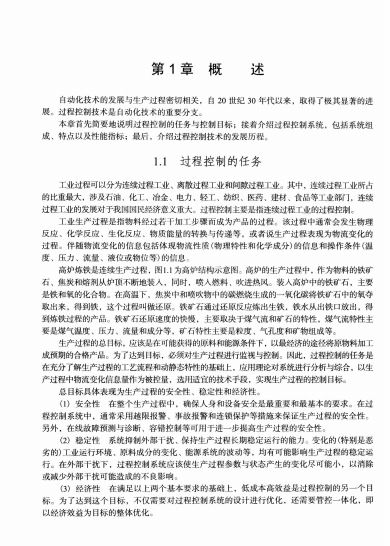
1.1 过程控制的任务
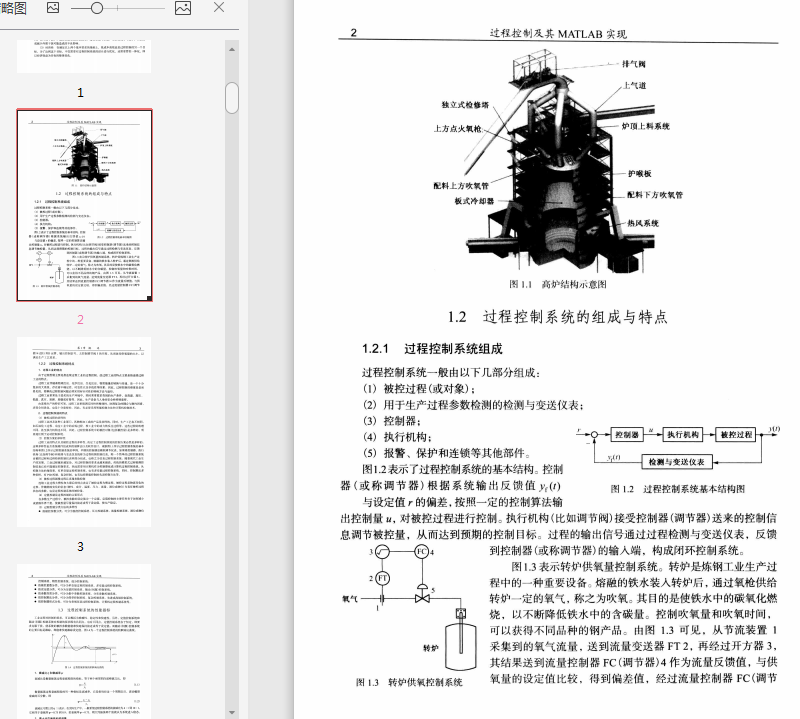
1.2 过程控制系统的组成与特点
1.2.1 过程控制系统组成
1.2.2 过程控制系统特点
1.3 过程控制系统的性能指标
1.4 过程控制的进展
1.4.1 过程控制装置进展
1.4.2 过程控制策略与算法的进展
本章小结
习题
第2章 过程控制系统建模方法
2.1 过程控制系统建模概念
2.1.1 建模概念
2.1.2 过程控制系统建模的两种基本方法
2.2 机理建模方法
2.2.1 单容对象的传递函数
2.2.2 具有纯延迟的单容对象特性
2.2.3 无自平衡能力的单容对象特性
2.2.4 多容对象的动态特性
2.3 测试建模方法
2.3.1 对象特性的实验测定方法
2.3.2 测定动态特性的时域法
2.3.3 测定动态特性的频域法
2.3.4 测定动态特性的统计相关法
2.3.5 最小二乘法
本章小结
习题
第3章 过程控制系统设计
3.1 过程控制系统设计步骤
3.2 确定控制变量与控制方案
3.2.1 确定控制目标
3.2.2 确定控制方案
3.3 过程控制系统硬件选择
3.3.1 控制装置
3.3.2 测量仪表和传感器的选型原则
3.4 节流元件计算
3.4.1 流量计算有关的基本概念
3.4.2 流量计类型
3.4.3 节流元件
3.5 调节阀选择
3.5.1 调节阀计算基础
3.5.2 调节阀的流量特性
3.5.3 调节阀口径计算
3.6 计算举例
3.6.1 角接取压标准孔板计算
3.6.2 蝶阀计算
本章小结
习题
第4章 PID调节原理
4.1 PID控制概述
4.2 比例调节(P调节)
4.2.1 比例调节的动作规律和比例带
4.2.2 比例调节的特点——有差调节
4.2.3 比例带对于调节过程的影响
4.3 积分调节(I调节)
4.3.1 积分调节规律和积分速度
4.3.2 积分调节的特点——无差调节
4.3.3 积分速度对于调节过程的影响
4.4 微分调节(D调节)
4.5 比例积分微分调节(PID调节)
4.5.1 比例积分(PI)调节
4.5.2 比例微分(PD)调节
4.5.3 比例积分微分调节规律及其基本特征
4.6 数字PID控制
4.6.1 数字PID控制算法
4.6.2 改进的数字PID算法
4.7 PID调节器的参数工程整定
4.7.1 PID参数整定的基本原则
4.7.2 PID参数的工程整定方法
4.7.3 PID参数的自整定方法
4.7.4 数字PID参数的整定
4.8 智能PID控制方法
4.8.1 模糊PID控制
4.8.2 神经网络PID控制
4.8.3 专家智能自整定PID控制
本章小结
习题
第5章 串 级 控 制
5.1 串级控制系统的基本原理
5.1.1 串级控制系统的基本概念
5.1.2 串级控制系统的组成
5.1.3 串级控制系统的工作过程
5.2 串级控制系统的特点
5.3 串级控制系统的设计
5.3.1 主、副回路的设计方法
5.3.2 主、副控制器正、反作用方式的确定
5.3.3 防止控制器积分饱和的措施
5.4 串级控制系统的控制器参数整定
5.5 串级控制系统的应用实例
本章小结
习题
第6章 特殊控制方法
6.1 比值控制系统
6.1.1 比值控制系统的基本概念
6.1.2 比值控制系统的分析
6.1.3 比值控制系统设计
6.1.4 比值控制系统的实施
6.1.5 比值控制系统的整定
6.1.6 比值控制系统中的若干问题
6.2 均匀控制系统
6.2.1 均匀控制的概念
6.2.2 均匀控制系统的结构形式
6.2.3 控制器的参数整定
6.3 分程控制系统
6.3.1 基本概念
6.3.2 分程控制的应用
6.3.3 分程阀总流量特性的改善
6.4 选择性控制系统
6.4.1 基本概念
6.4.2 选择性控制系统的类型及应用
6.4.3 选择性控制系统的设计
6.4.4 积分饱和及其防止措施
6.5 阀位控制系统
6.5.1 基本概念
6.5.2 阀位控制系统的应用
6.5.3 阀位控制系统的设计与整定
本章小结
习题
第7章 补偿控制
7.1 补偿控制的基本原理与结构
7.2 前馈控制系统
7.2.1 前馈控制系统的概念
7.2.2 前馈控制系统的基本结构
7.3 大迟延过程系统
7.3.1 延迟对系统品质的影响
7.3.2 Smith预估器
7.3.3 大林(Dahlin)算法
本章小结
习题
第8章 关联分析与解耦控制
8.1 控制回路间的关联
8.1.1 控制回路间的耦合
8.1.2 被控对象的典型耦合结构
8.1.3 耦合程度分析方法
8.2 相对增益矩阵
8.2.1 相对增益矩阵的定义
8.2.2 相对增益的计算
8.2.3 第二放大系数qij的直接计算法
8.2.4 相对增益矩阵的特性
8.3 减少及消除耦合的方法
8.4 解耦控制系统设计
8.4.1 前馈补偿解耦法
8.4.2 反馈解耦法
8.4.3 对角阵解耦法
8.4.4 单位阵解耦法
本章小结
习题
第9章 模糊控制
9.1 概述
9.1.1 模糊的基本概念
9.1.2 模糊控制系统
9.2 模糊集合的基本概念
9.2.1 模糊集合
9.2.2 模糊集的基本运算
9.3 模糊关系
9.3.1 普通关系
9.3.2 模糊关系
9.3.3 模糊变换
9.3.4 模糊决策
9.4 模糊推理
9.4.1 模糊逻辑
9.4.2 模糊语言算子
9.4.3 模糊推理
9.5 模糊控制器原理及设计
9.5.1 模糊控制系统的组成
9.5.2 模糊控制原理
9.5.3 模糊控制系统设计
9.6 工业电阻炉温度模糊控制系统
9.6.1 系统简介
9.6.2 电阻炉温度模糊控制器设计
9.6.3 控制效果
9.7 浮选过程模糊控制系统
9.7.1 浮选工艺过程
9.7.2 浮选过程模糊控制器设计
9.7.3 控制效果
本章小结
习题
第10章 预测控制
10.1 模型预测控制的基本原理
10.2 动态矩阵控制DMC
10.2.1 预测模型
10.2.2 滚动优化
10.2.3 反馈校正
10.2.4 算法实现
10.2.5 参数选择
10.2.6 DMC的主要特征和优点
10.3 模型算法控制MAC
10.3.1 具有简易性能指标的MAC算法
10.3.2 具有一般性能指标的MAC算法
10.3.3 算法实现
10.3.4 MAC的主要特征和优点
10.4 广义预测控制算法
10.4.1 广义预测控制基本理论
10.4.2 基于Toeplitz预测方程的广义预测控制算法
本章小结
习题
第11章 先进控制
11.1 自适应控制
11.1.1 自适应控制概述
11.1.2 模型参考自适应控制
11.1.3 自校正控制
11.2 智能控制
11.2.1 智能控制基础
11.2.2 智能控制的理论结构
11.2.3 递阶控制
11.2.4 基于知识的专家控制
11.2.5 仿人智能控制
11.2.6 神经控制
11.3 鲁棒控制
11.3.1 基本概念
11.3.2 H∞优化与鲁棒控制
11.3.3 标准H∞控制
11.3.4 H∞控制的求解
本章小结
内容书摘
第12章集散控制系统(DCS)和现场总线控制系统(FCS)
由于DCS和FCS不仅具有连续控制和逻辑控制功能,而且具有顺序控制和批量控制的功能,因此,DCS和FCS既可以用于连续过程工业,也可以用于连续和离散混合的间歇过程工业。总之,DCS和FCS已经在过程控制领域得到了广泛的应用,不仅用于分散控制,而且向着集成管理的方向发展。在计算机集成制造系统( Computer Integrated Manufacturing SystemCIMS)或计算机集成过程系统( Computer Integrated Process System,CIPs)中,DCS和FCS是基础,通过其开放式网络与生产管理层和决策管理层网络相连,实现控制与管理的信息集成进而实现企业的生产、控制和管理的全局优化。
章概述DCS和FCS的产生过程、发展历程、特点和优点,以及DCS和FCS的体系结构。其目的是让读者建立DCS和FCS的基本概念。
12.1DCS概述
在连续过程控制中,常规模拟仪表控制和早期的计算机控制可以归纳为仪表分散控制、仪表集中控制和计算机集中控制3种类型。人们分析比较了常规模拟仪表控制和计算机集中控制的优缺点之后,研制出了计算机集散控制系统(CS)。
过程控制及其MATLAB实现第2版截图





相关资料1:
- GB∕T 34930-2017 微电网接入配电网运行控制规范 pdf 免费电子版
- 《洗脑术 思想控制的荒唐史》 多米尼克·斯垂特菲尔德.pdf
- 《如何控制自己的情绪-》.pdf .mobi
- 疾病的预防与控制课件.ppt
- 《如何控制负面情绪》.pdf
- 再见,演讲焦虑:七天控制你的公众演讲焦虑-李超 亚然.pdf
- 控制测量学pdf
- 严重高血糖2型糖尿病患者血糖控制前后C肽水平的变化.pdf
- 欧姆社学习漫画顺序控制.[日]藤泷和弘.pdf .mobi
- 欧姆社学习漫画-电力电气·漫画顺序控制-[日]藤泷和弘-刘卫颖(译)-科学出版社-2010.pdf .mobi
- 《纳税风险控制手册》.pdf
- 新时期挑战-有效控制收缩压(程主任).ppt
- 《计算机控制技术及应用王平教材》.pdf
- 躯干运动和负重时对足底支撑面侧向横移的姿势控制.caj
- 《心理学大师埃利斯经典作品集》套装共3册.mobi
相关资料2:
- 2018年新编版最高人民法院司法观点集成 增订版 民商卷 02 可检索(更多好课添加 luo_daidai).pdf
- 材料力学 孙训方第五5版 同步辅导及课后习题思考题答案全解解析上册.pdf
- 2018年新编版最高人民法院司法观点集成 增订版 民商卷 03 可检索(更多好课添加 luo_daidai).pdf
- 东尼·博赞思维导图系列(套装共7册).epub
- 这样编码才规范.pdf
- 从零开始学html+css3.pdf
- 醉步男小林泰三.pdf
- 2018年新编版最高人民法院司法观点集成 增订版 民商卷 01 可检索(更多好课添加 luo_daidai).pdf
- 荣格作品集(全7册).mobi
- 发明者电子设计宝典.pdf
- 诸子百家闪耀时林欣浩在经.pdf
- 材料力学 孙训方第五5版 同步辅导及课后习题思考题答案全解解析下册.pdf
- 人是一根会思考的芦苇.azw3
- 书读完了+mobi+txt.pdf
- 孙训方 材料力学II 第五版.pdf